Choi Dong-Soo, Kim Sang-Youn
Advanced Technology Research Center, Interdisciplinary Program in Creative Engineering, Korea University of Technology and Education, Cheonan-si 31253, Korea.
Sensors (Basel). 2019 Aug 9;19(16):3490. doi: 10.3390/s19163490.
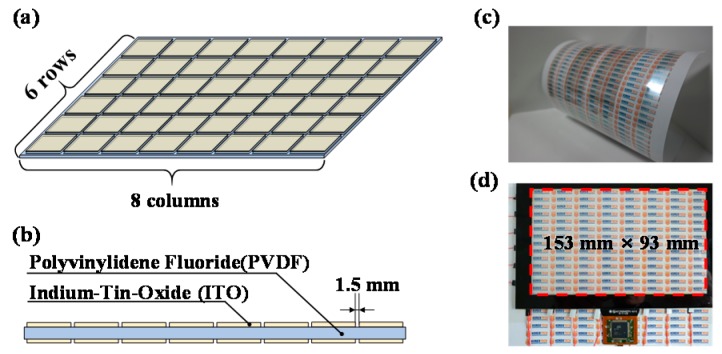
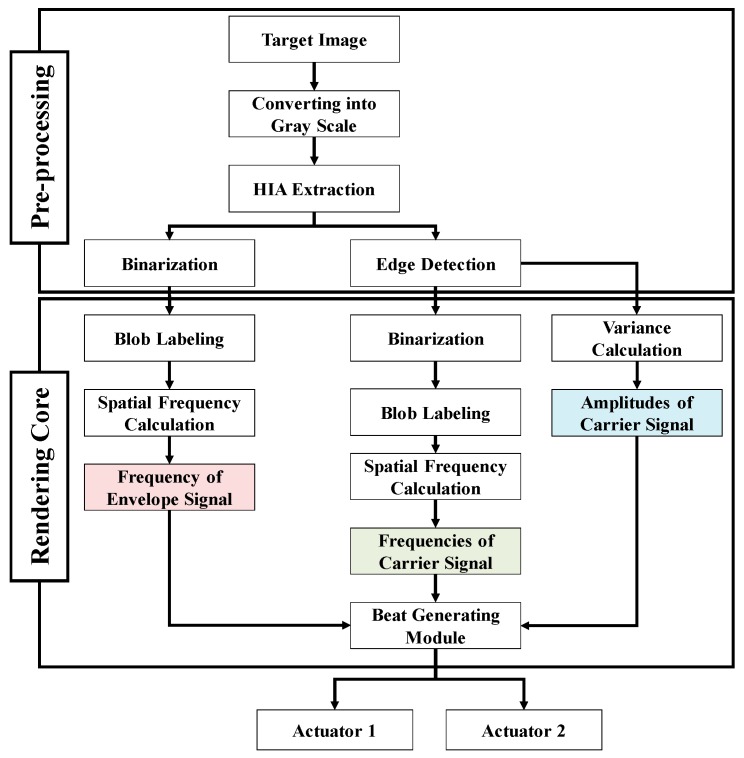
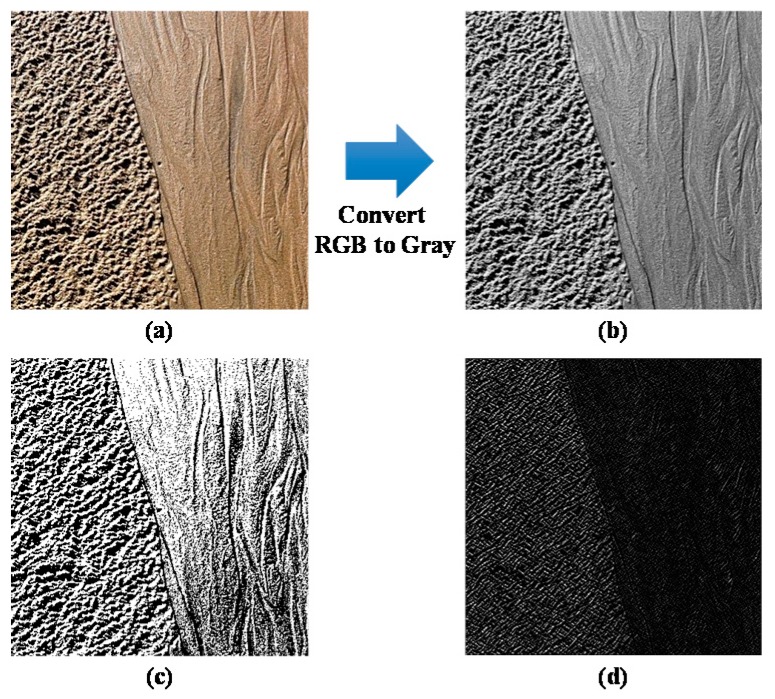
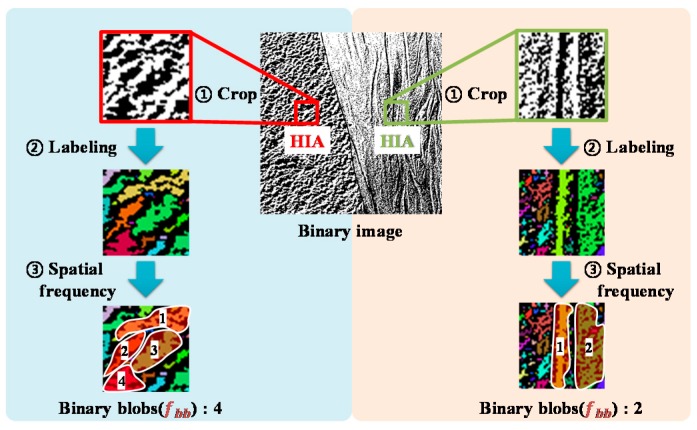
The most important thing in a thin and soft haptic module with an electroactive polymer actuator array is to increase its vibrotactile amplitude and to create a variety of vibrotactile sensations. In this paper, we introduce a thin film-type electroactive polymer actuator array capable of stimulating two types of human mechanoreceptors simultaneously, and we present a haptic rendering method that maximizes the actuators' vibrational force without improving the array's haptic performance. The increase in vibrational amplitude of the soft electroactive polymer actuator array is achieved by creating a beat vibration, which is an interference pattern of two vibrations with slightly different frequencies. The textures of a target object are translated into haptic stimuli using the proposed method. We conducted qualitative and quantitative experiments to evaluate the performance of the proposed rendering method. The results showed that this method not only amplifies the vibration's amplitude but also haptically simulates various objects' surfaces.
在具有电活性聚合物致动器阵列的薄而柔软的触觉模块中,最重要的是提高其振动触觉幅度并创造各种振动触觉感受。在本文中,我们介绍了一种能够同时刺激两种人类机械感受器的薄膜型电活性聚合物致动器阵列,并提出了一种触觉渲染方法,该方法在不提高阵列触觉性能的情况下最大化致动器的振动力。通过产生拍频振动来实现软电活性聚合物致动器阵列振动幅度的增加,拍频振动是两种频率略有不同的振动的干涉图样。使用所提出的方法将目标物体的纹理转换为触觉刺激。我们进行了定性和定量实验来评估所提出的渲染方法的性能。结果表明,该方法不仅放大了振动幅度,还能通过触觉模拟各种物体的表面。