Patel Niravkumar A, Li Gang, Shang Weijian, Wartenberg Marek, Heffter Tamas, Burdette Everette C, Iordachita Iulian, Tokuda Junichi, Hata Nobuhiko, Tempany Clare M, Fischer Gregory S
Automation and Interventional Medicine Laboratory, Worcester Polytechnic Institute, Worcester, MA 01609, USA [napatel, gfischerj]@wpi.edu.
indicates shared first authorship.
J Med Robot Res. 2019 Jun;4(2). doi: 10.1142/S2424905X19500016. Epub 2018 May 15.
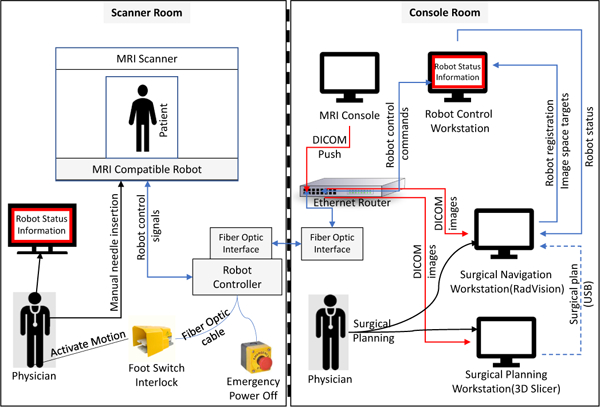
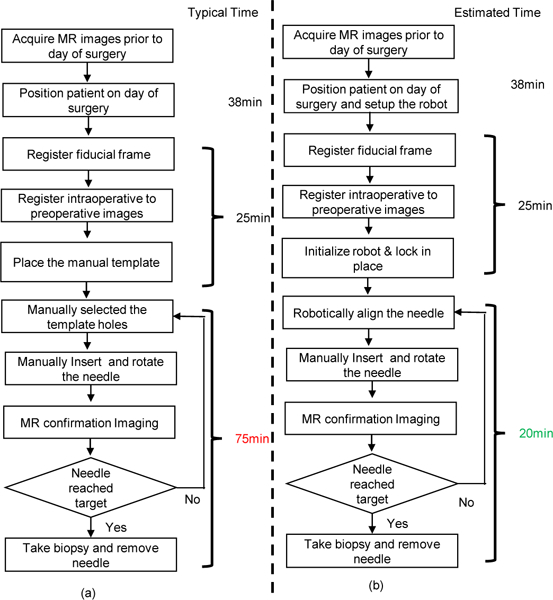
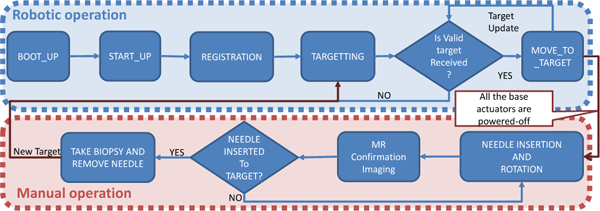
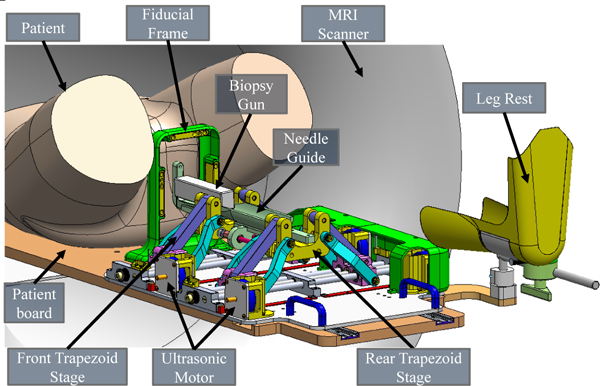
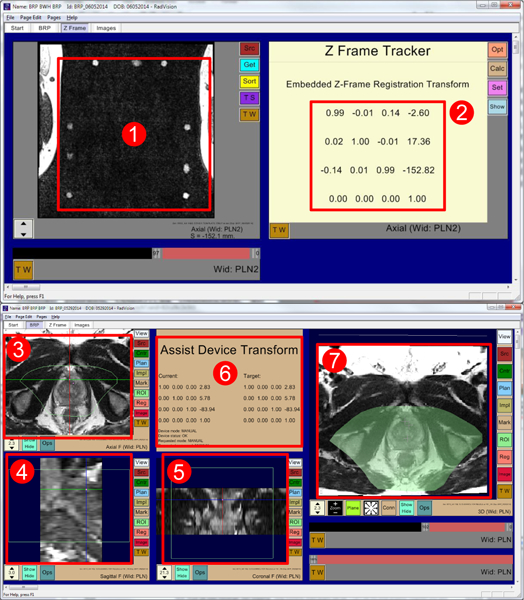
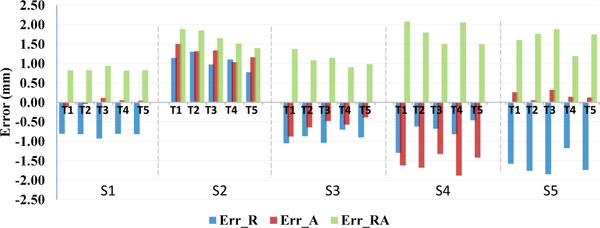
This paper presents the development, preclinical evaluation, and preliminary clinical study of a robotic system for targeted transperineal prostate biopsy under direct interventional magnetic resonance imaging (MRI) guidance. The clinically integrated robotic system is developed based on a modular design approach, comprised of surgical navigation application, robot control software, MRI robot controller hardware, and robotic needle placement manipulator. The system provides enabling technologies for MRI-guided procedures. It can be easily transported and setup for supporting the clinical workflow of interventional procedures, and the system is readily extensible and reconfigurable to other clinical applications. Preclinical evaluation of the system is performed with phantom studies in a 3 Tesla MRI scanner, rehearsing the proposed clinical workflow, and demonstrating an in-plane targeting error of 1.5mm. The robotic system has been approved by the institutional review board (IRB) for clinical trials. A preliminary clinical study is conducted with the patient consent, demonstrating the targeting errors at two biopsy target sites to be 4.0 and 3.7, which is sufficient to target a clinically significant tumor foci. First-in-human trials to evaluate the system's effectiveness and accuracy for MR image-guide prostate biopsy are underway.
本文介绍了一种在直接介入磁共振成像(MRI)引导下进行靶向经会阴前列腺活检的机器人系统的开发、临床前评估和初步临床研究。该临床集成机器人系统基于模块化设计方法开发,由手术导航应用程序、机器人控制软件、MRI机器人控制器硬件和机器人针放置操纵器组成。该系统为MRI引导的手术提供了支持技术。它可以轻松运输和设置,以支持介入手术的临床工作流程,并且该系统易于扩展和重新配置以用于其他临床应用。在3特斯拉MRI扫描仪中使用模型研究对该系统进行临床前评估,演练了拟议的临床工作流程,并证明平面内靶向误差为1.5毫米。该机器人系统已获得机构审查委员会(IRB)批准用于临床试验。在患者同意的情况下进行了初步临床研究,结果表明两个活检靶点处的靶向误差分别为4.0和3.7,足以靶向具有临床意义的肿瘤病灶。评估该系统在MR图像引导前列腺活检中的有效性和准确性的首次人体试验正在进行中。