Children's National Health System, Sheikh Zayed Institute for Pediatric Surgical Innovation, 111 Michigan Avenue, Washington, DC 20010.
Johns Hopkins University, Brady Urological Institute, Urobotics Laboratory, Baltimore, Maryland.
Acad Radiol. 2018 Jan;25(1):74-81. doi: 10.1016/j.acra.2017.08.008. Epub 2017 Oct 23.
Our research team has developed a magnetic resonance imaging (MRI)-compatible robot for long bone biopsy. The robot is intended to enable a new workflow for bone biopsy in pediatrics under MRI imaging. Our long-term objectives are to minimize trauma and eliminate radiation exposure when diagnosing children with bone cancers and bone infections. This article presents our robotic systems, phantom accuracy studies, and workflow analysis.
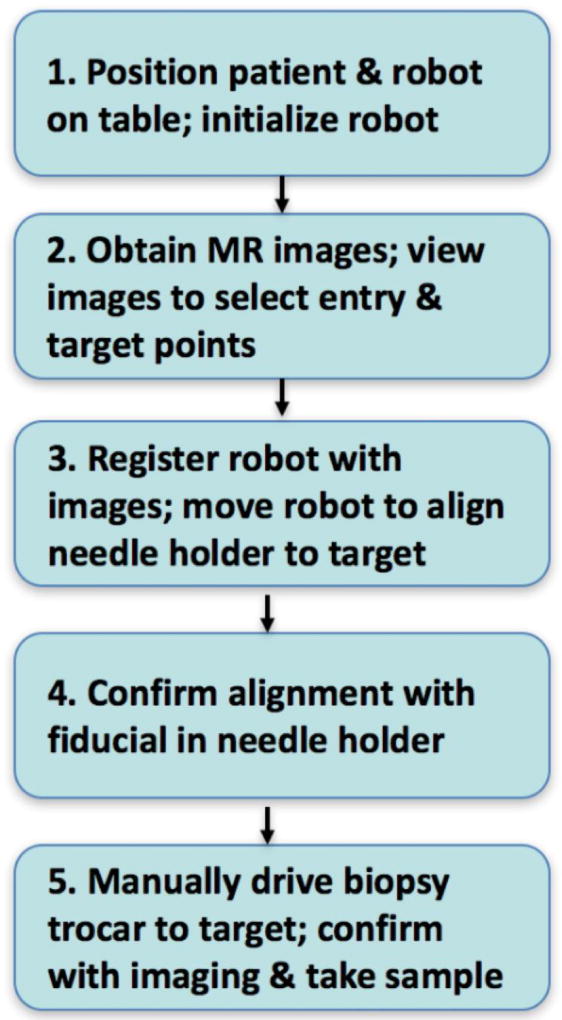
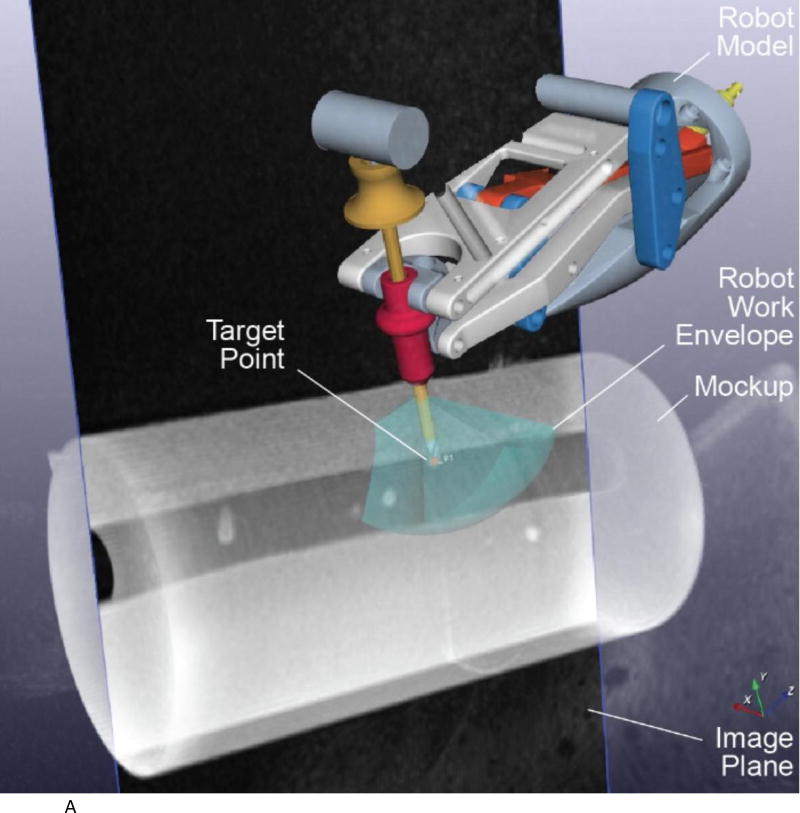
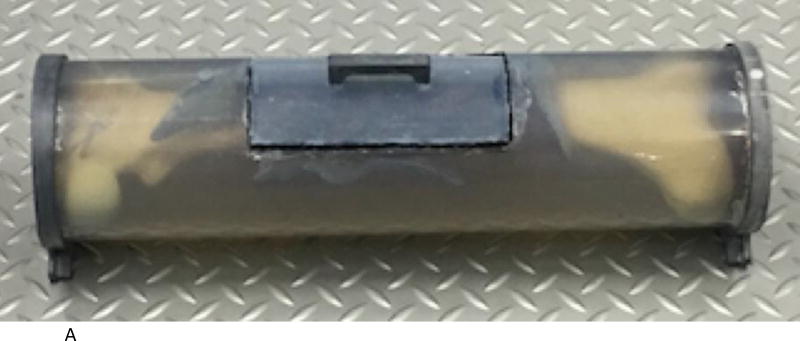
This section describes several aspects of our work including the envisioned clinical workflow, the MRI-compatible robot, and the experimental setup. The workflow consists of five steps and is intended to enable the entire procedure to be completed in the MRI suite. The MRI-compatible robot is MR Safe, has 3 degrees of freedom, and a remote center of motion mechanism for orienting a needle guide. The accuracy study was done in a Siemens Aera 1.5T scanner with a long bone phantom. Four targeting holes were drilled in the phantom.
Each target was approached twice at slightly oblique angles using the robot needle guide for a total of eight attempts. A workflow analysis showed the average time for each targeting attempt was 32 minutes, including robot setup time. The average 3D targeting error was 1.39 mm with a standard deviation of 0.40 mm. All of the targets were successfully reached.
The results showed the ability of the robotic system in assisting the radiologist to precisely target a bone phantom in the MRI environment. The robot system has several potential advantages for clinical application, including the ability to work at the MRI isocenter and serve as a steady and precise guide.
我们的研究团队开发了一种用于长骨活检的磁共振成像(MRI)兼容机器人。该机器人旨在为儿科患者在 MRI 成像下进行骨活检提供新的工作流程。我们的长期目标是在诊断儿童骨癌和骨感染时,尽量减少创伤并消除辐射暴露。本文介绍了我们的机器人系统、体模准确性研究和工作流程分析。
这部分描述了我们工作的几个方面,包括预期的临床工作流程、MRI 兼容机器人和实验设置。该工作流程由五个步骤组成,旨在使整个过程能够在 MRI 套件中完成。MRI 兼容机器人是符合磁共振安全标准的,具有 3 个自由度和一个远程运动中心机构,用于定向针引导器。准确性研究是在西门子 Aera 1.5T 扫描仪上使用长骨体模进行的。在体模上钻了四个定位孔。
使用机器人针引导器以略微倾斜的角度两次接近每个目标,总共进行了 8 次尝试。工作流程分析表明,每次靶向尝试的平均时间为 32 分钟,包括机器人设置时间。平均 3D 靶向误差为 1.39mm,标准偏差为 0.40mm。所有目标均成功到达。
结果表明,机器人系统能够协助放射科医生在 MRI 环境中精确瞄准骨体模。该机器人系统具有几个潜在的临床应用优势,包括在 MRI 等中心工作的能力以及作为稳定而精确的导向器的能力。