CESTER, Technical University of Cluj-Napoca, 400641 Cluj-Napoca, Romania.
Municipal Clinical Hospital Cluj-Napoca, 400139 Cluj-Napoca, Romania.
Int J Environ Res Public Health. 2020 Jan 19;17(2):654. doi: 10.3390/ijerph17020654.
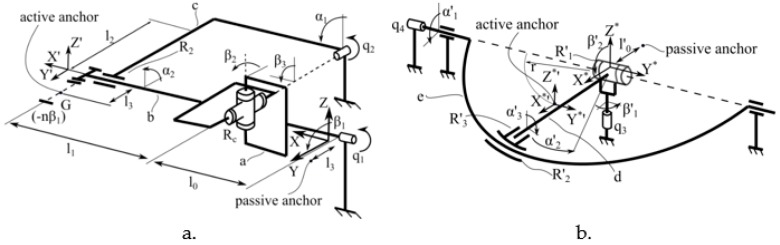
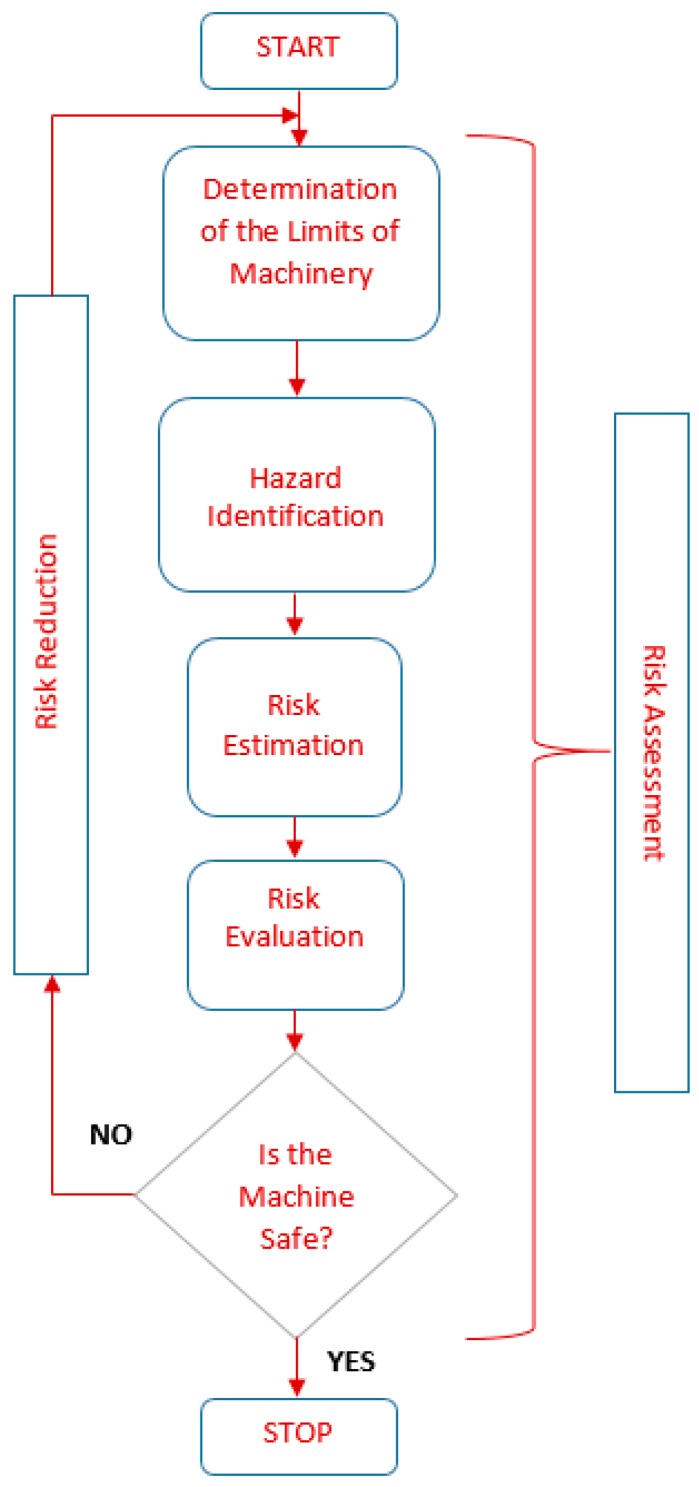
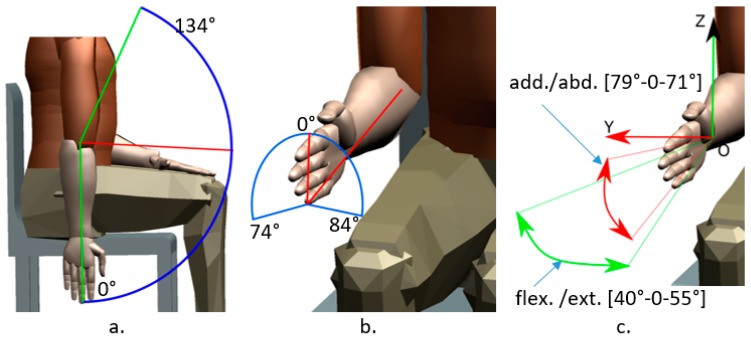
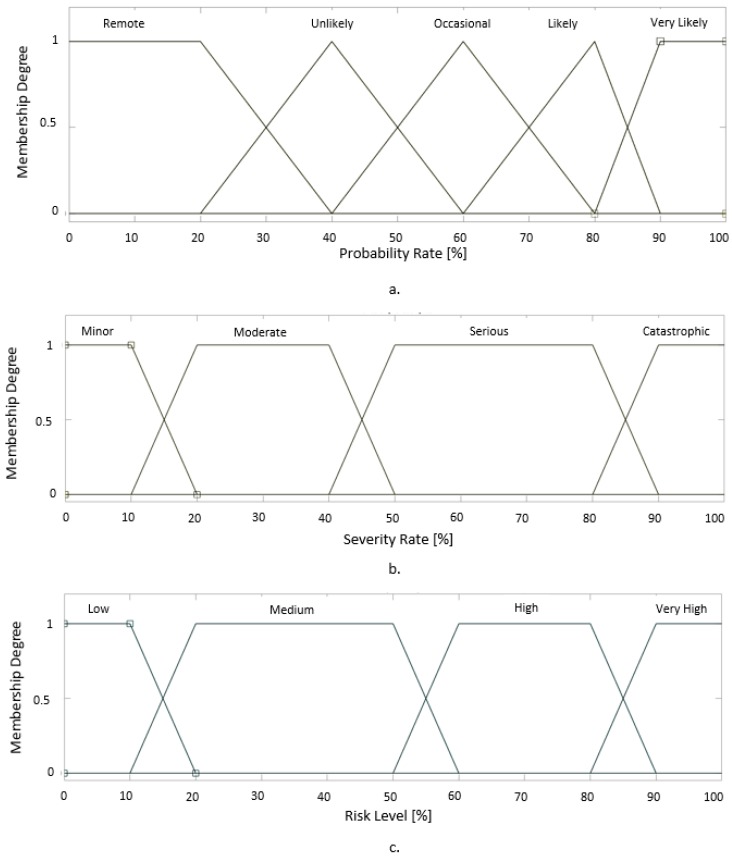
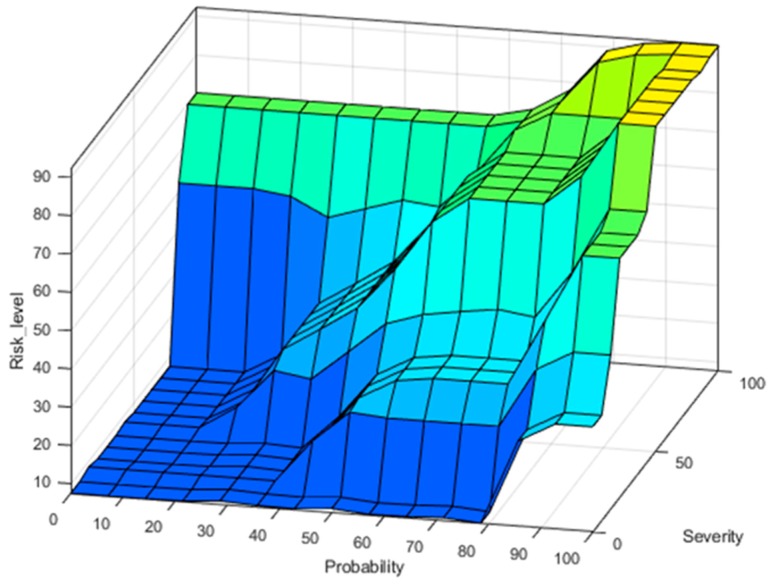
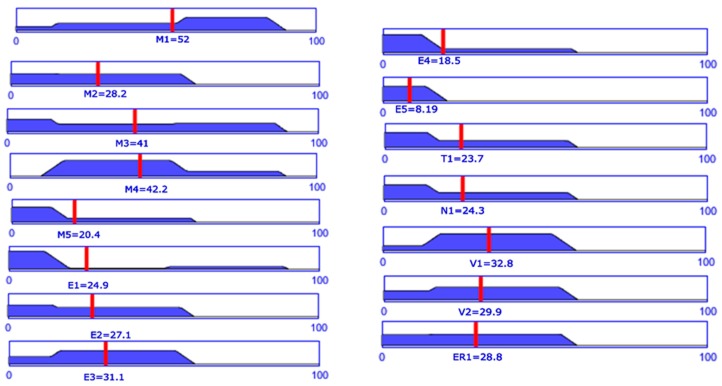
A few decades ago, robotics started to be implemented in the medical field, especially in the rehabilitation of patients with different neurological diseases that have led to neuromuscular disorders. The main concern regarding medical robots is their safety assurance in the medical environment. The goal of this paper is to assess the risk of a medical robotic system for elbow and wrist rehabilitation in terms of robot and patient safety. The approached risk assessment follows the ISO12100:2010 risk management chart in order to determine, identify, estimate, and evaluate the possible risk that can occur during the use of the robotic system. The result of the risk assessment process is further analyzed using a fuzzy logic system in order to determine the safety degree conferred during the use of the robotic system. The innovative process concerning the risk assessment allows the achievement of a reliable medical robotic system both for the patient and the clinicians as well. The clinical trials performed on a group of 18 patients validated the functionality and the safe behavior of the robotic system.
几十年前,机器人技术开始应用于医疗领域,特别是在对因不同神经疾病而导致神经肌肉障碍的患者的康复治疗中。医疗机器人的主要关注点在于其在医疗环境中的安全保障。本文旨在评估用于肘部和腕部康复的医疗机器人系统在机器人和患者安全方面的风险。所采用的风险评估方法遵循 ISO12100:2010 风险管理图,以确定、识别、估计和评估在使用机器人系统过程中可能出现的风险。使用模糊逻辑系统对风险评估的结果进行进一步分析,以确定在使用机器人系统过程中赋予的安全程度。风险评估方面的创新过程使该医疗机器人系统既适用于患者,也适用于临床医生,从而实现了可靠的性能。对一组 18 名患者进行的临床试验验证了机器人系统的功能和安全性能。