Institute of Photogrammetry and Remote Sensing, Karlsruhe Institute of Technology, 76128 Karlsruhe, Germany.
Sensors (Basel). 2020 Feb 14;20(4):1021. doi: 10.3390/s20041021.
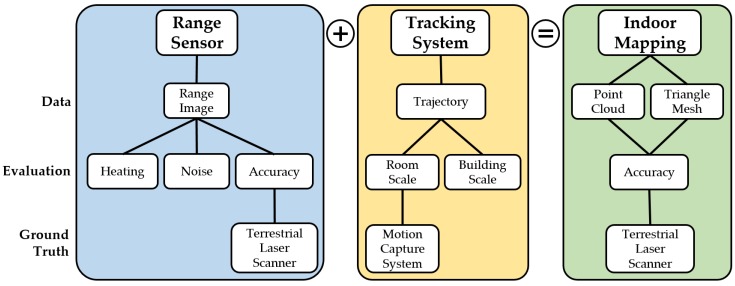
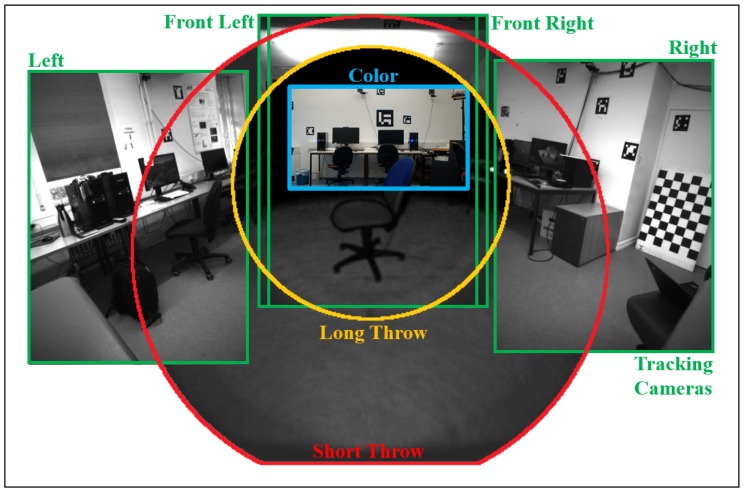
The Microsoft HoloLens is a head-worn mobile augmented reality device that is capable of mapping its direct environment in real-time as triangle meshes and localize itself within these three-dimensional meshes simultaneously. The device is equipped with a variety of sensors including four tracking cameras and a time-of-flight (ToF) range camera. Sensor images and their poses estimated by the built-in tracking system can be accessed by the user. This makes the HoloLens potentially interesting as an indoor mapping device. In this paper, we introduce the different sensors of the device and evaluate the complete system in respect of the task of mapping indoor environments. The overall quality of such a system depends mainly on the quality of the depth sensor together with its associated pose derived from the tracking system. For this purpose, we first evaluate the performance of the HoloLens depth sensor and its tracking system separately. Finally, we evaluate the overall system regarding its capability for mapping multi-room environments.
微软 HoloLens 是一款头戴式移动增强现实设备,能够实时绘制其直接环境的三角形网格,并同时在这些三维网格中定位自身。该设备配备了多种传感器,包括四个跟踪摄像头和一个飞行时间 (ToF) 距离摄像头。用户可以访问内置跟踪系统估计的传感器图像及其姿态。这使得 HoloLens 作为室内测绘设备具有潜在的吸引力。在本文中,我们介绍了该设备的不同传感器,并评估了该系统在室内环境测绘任务方面的整体性能。该系统的整体质量主要取决于深度传感器的质量及其来自跟踪系统的相关姿态。为此,我们首先分别评估 HoloLens 深度传感器及其跟踪系统的性能。最后,我们评估了整个系统在测绘多房间环境方面的能力。