School of Software, Shandong University, Jinan 250101, China.
School of Information Science and Engineering, Shandong Normal University, Jinan 250358, China.
Sensors (Basel). 2020 Feb 15;20(4):1056. doi: 10.3390/s20041056.
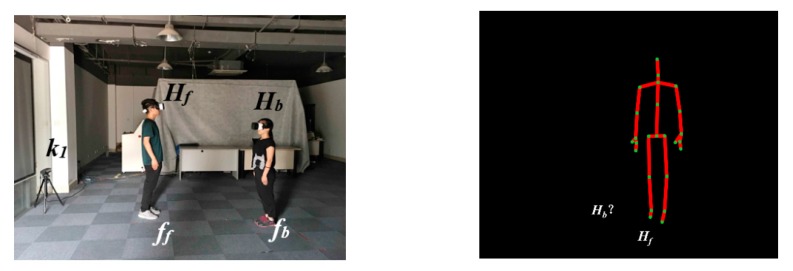
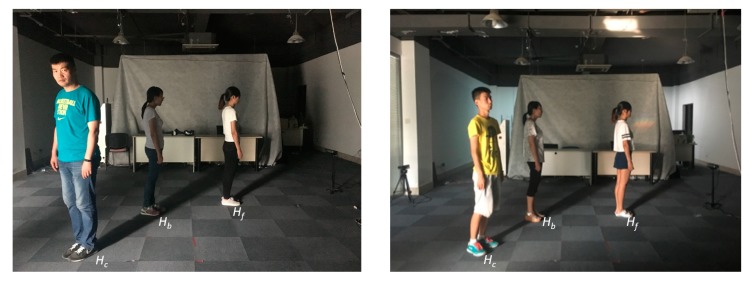
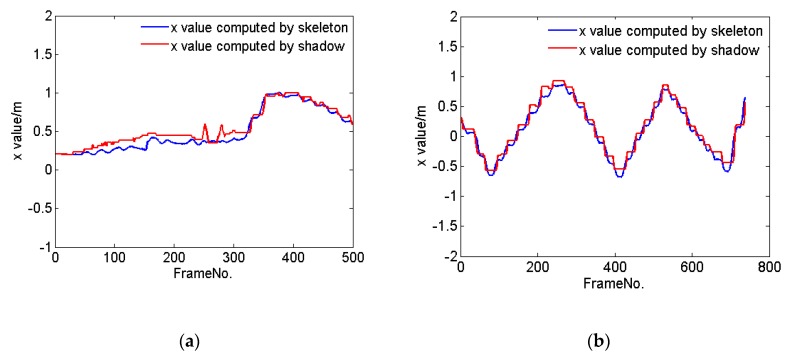
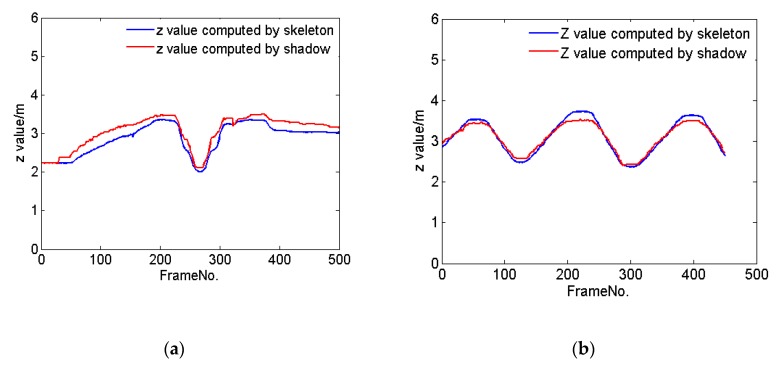
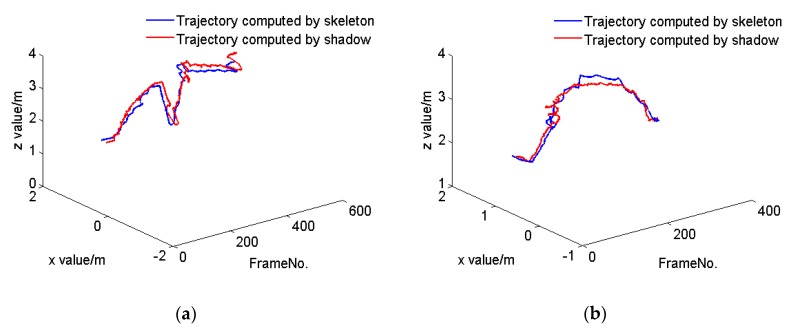
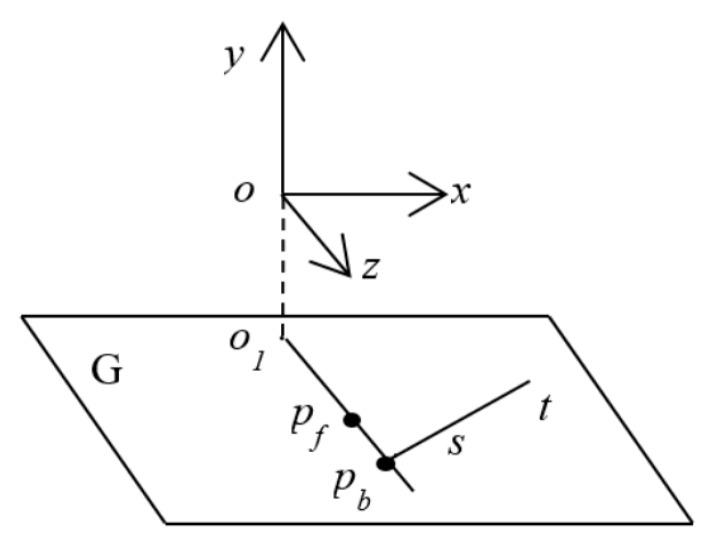
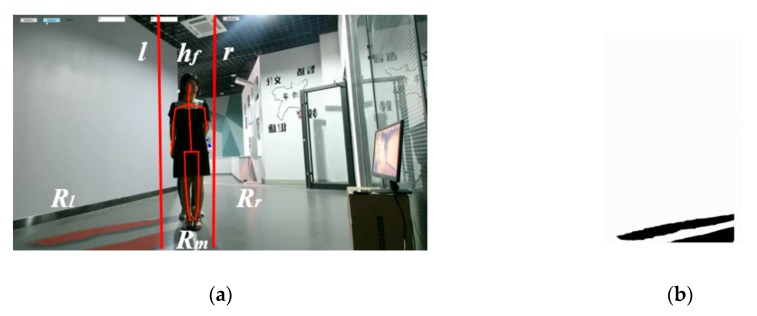
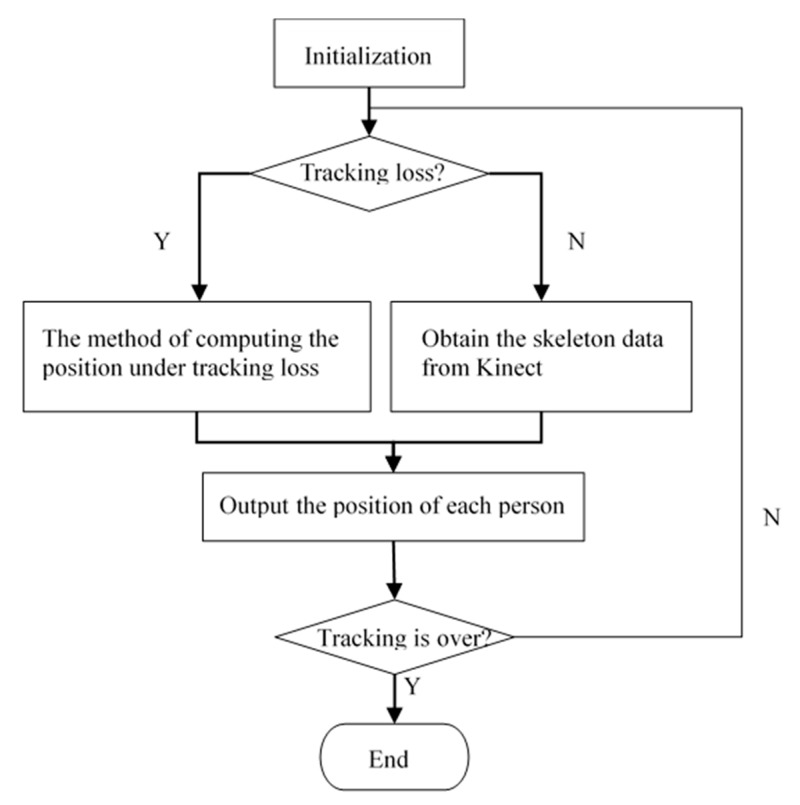
Although there are many algorithms to track people that are walking, existing methods mostly fail to cope with occluded bodies in the setting of multi-person tracking with one camera. In this paper, we propose a method to use people's shadows as a clue to track them instead of treating shadows as mere noise. We introduce a novel method to track multiple people by fusing shadow data from the RGB image with skeleton data, both of which are captured by a single RGB Depth (RGB-D) camera. Skeletal tracking provides the positions of people that can be captured directly, while their shadows are used to track them when they are no longer visible. Our experiments confirm that this method can efficiently handle full occlusions. It thus has substantial value in resolving the occlusion problem in multi-person tracking, even with other kinds of cameras.
尽管有许多用于跟踪行人的算法,但现有的方法在使用单目相机进行多人跟踪的情况下,大多无法应对被遮挡的人体。在本文中,我们提出了一种使用人体阴影作为线索进行跟踪的方法,而不是将阴影视为纯粹的噪声。我们引入了一种新颖的方法,通过融合来自 RGB 图像的阴影数据和骨骼数据来跟踪多个人,这两种数据都是由单个 RGB-D(红绿蓝-深度)相机捕获的。骨骼跟踪提供了可以直接捕获的人体位置,而当人体不可见时,则使用其阴影来跟踪他们。我们的实验证实,这种方法可以有效地处理完全遮挡。因此,它在解决多人跟踪中的遮挡问题方面具有重要价值,甚至可以应用于其他类型的相机。