Liu Fei, Zhang Jixian, Wang Jian, Han Houzeng, Yang Deng
School of Environment Science and Spatial Informatics, China University of Mining and Technology (CUMT), Xuzhou 221116, China.
National Quality Inspection and Testing Center for Surveying and Mapping Products, Beijing 100830, China.
Sensors (Basel). 2020 Feb 19;20(4):1139. doi: 10.3390/s20041139.
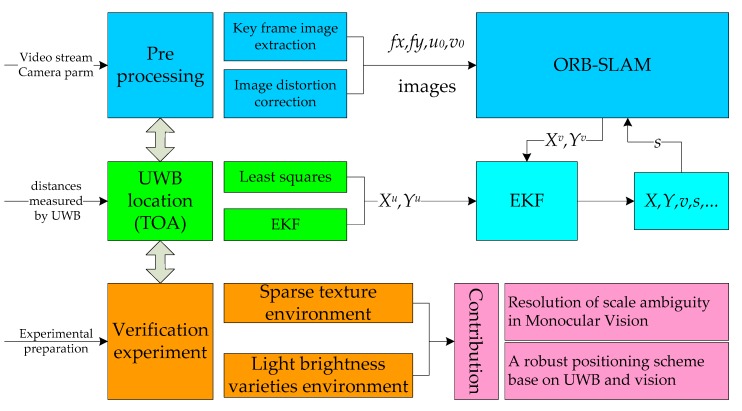
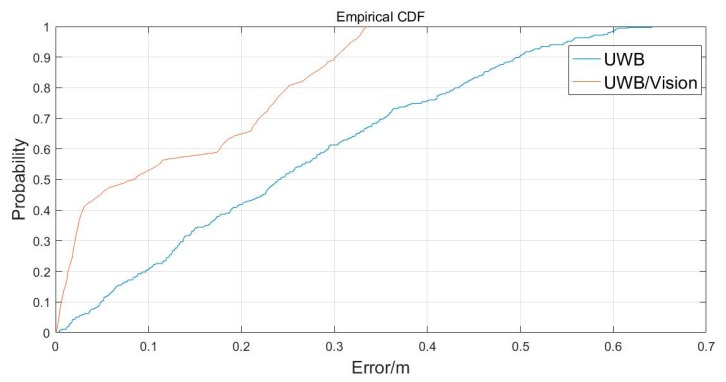
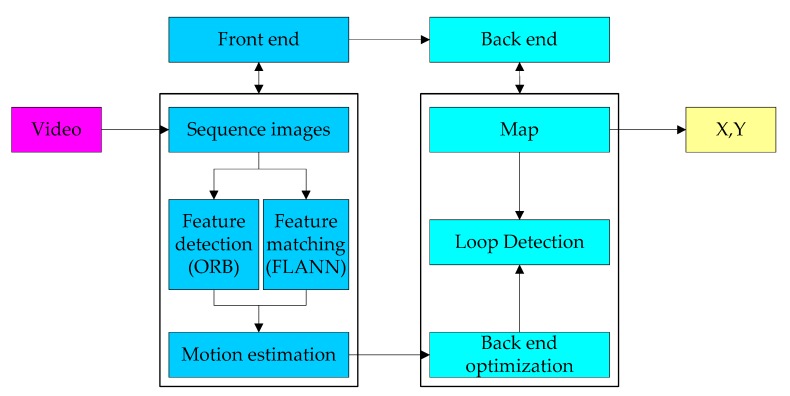
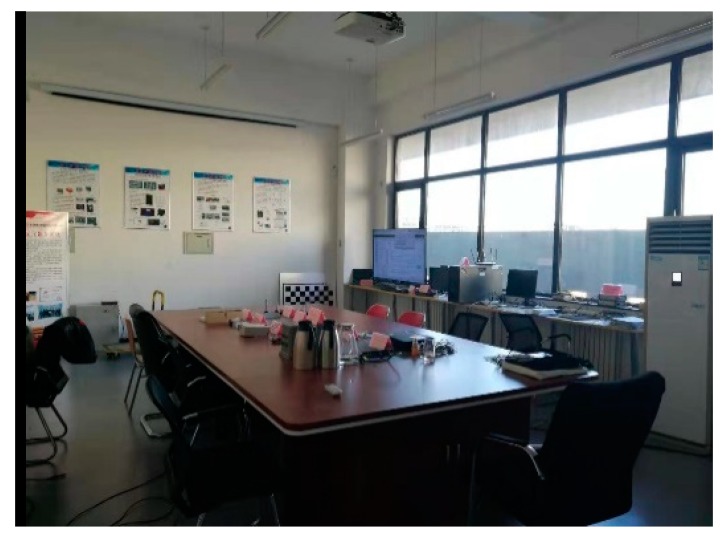
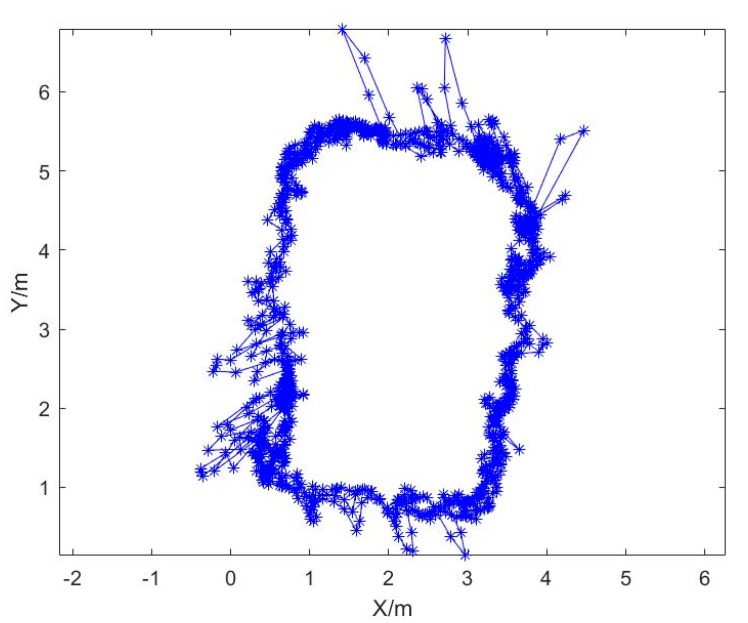
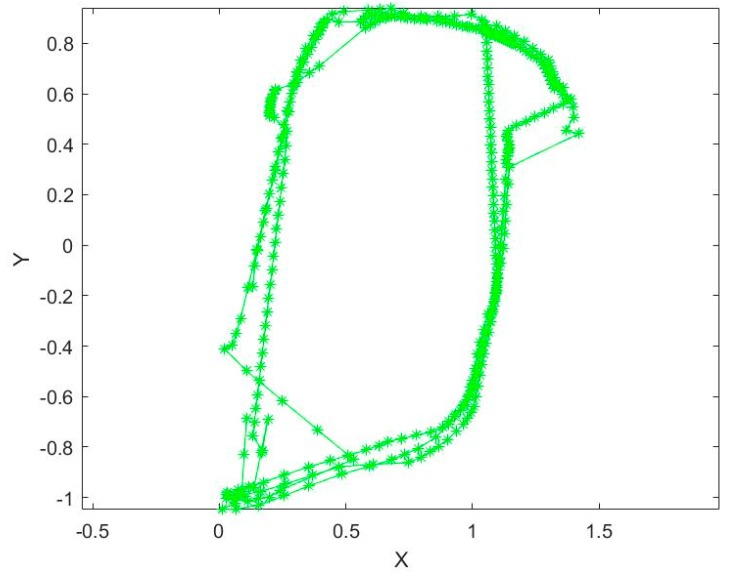
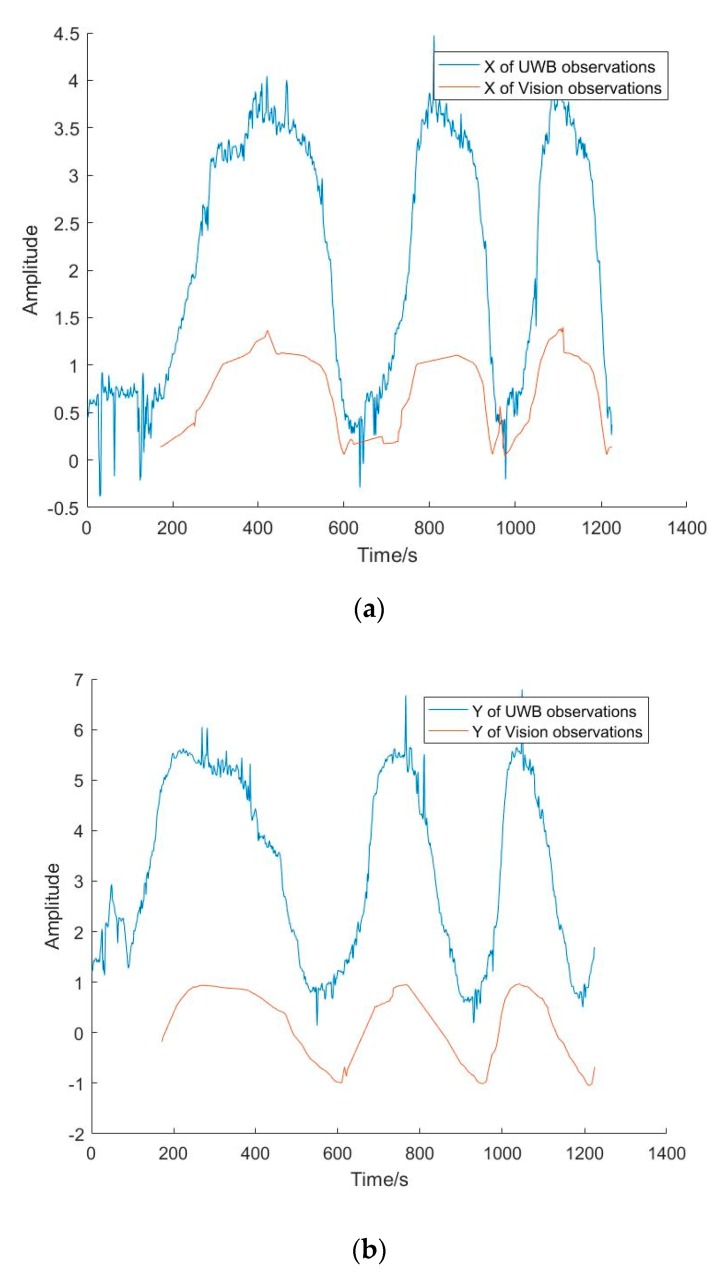
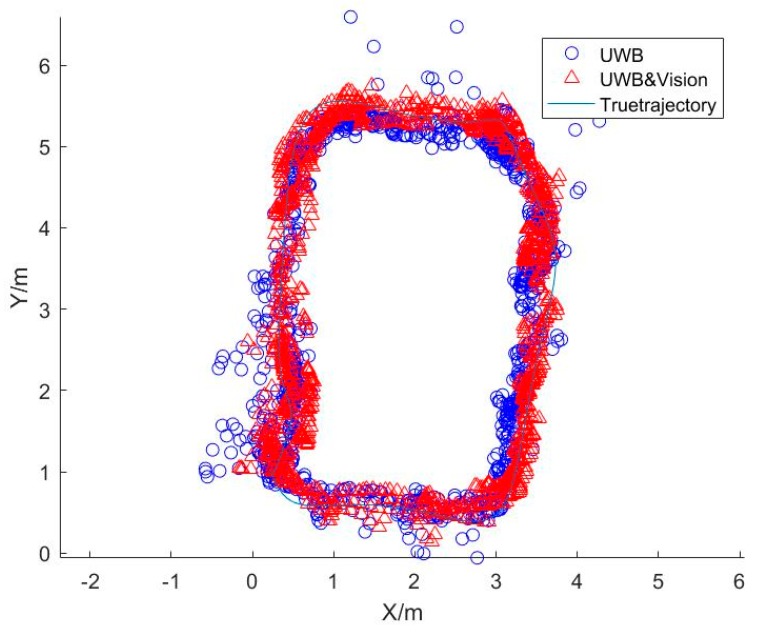
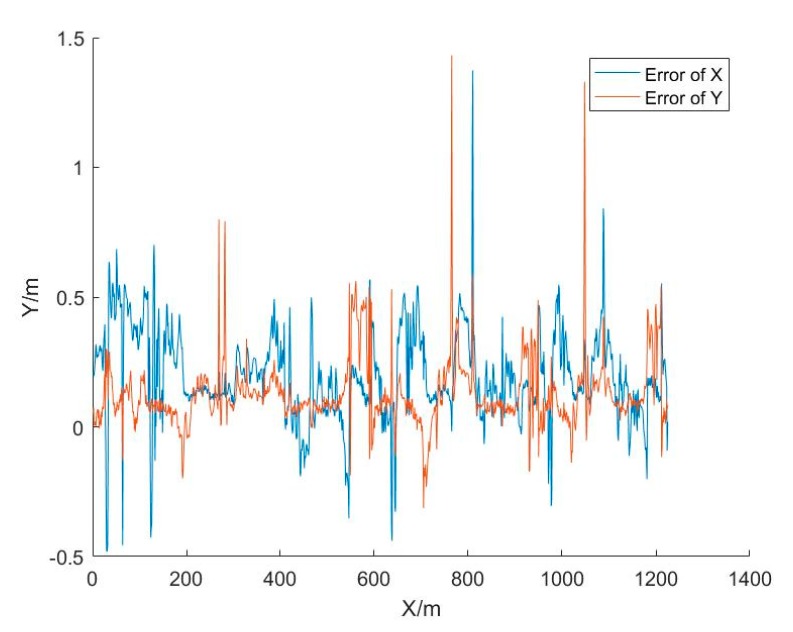
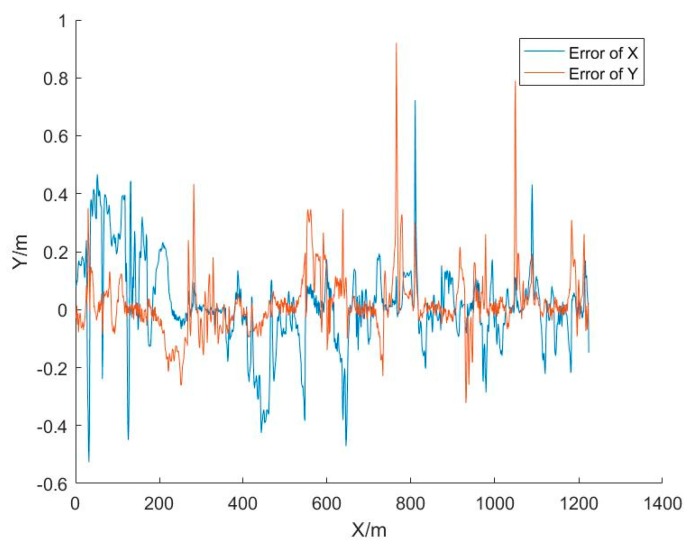
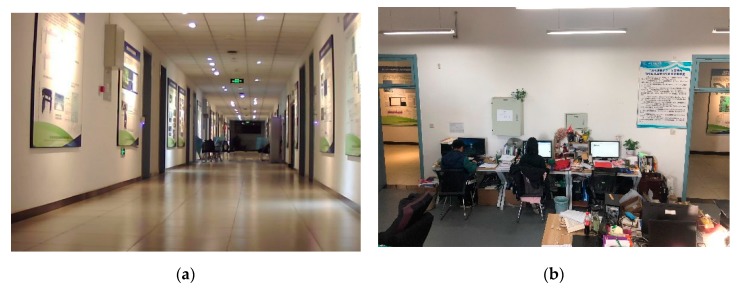
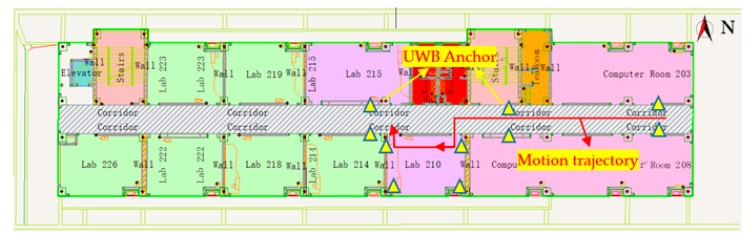
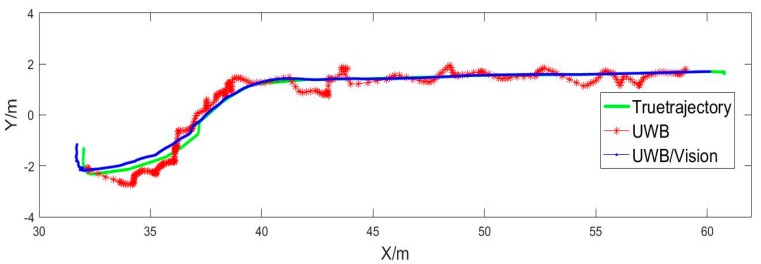
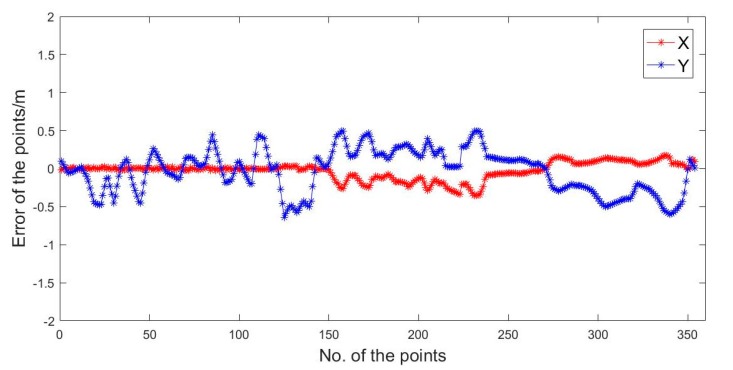
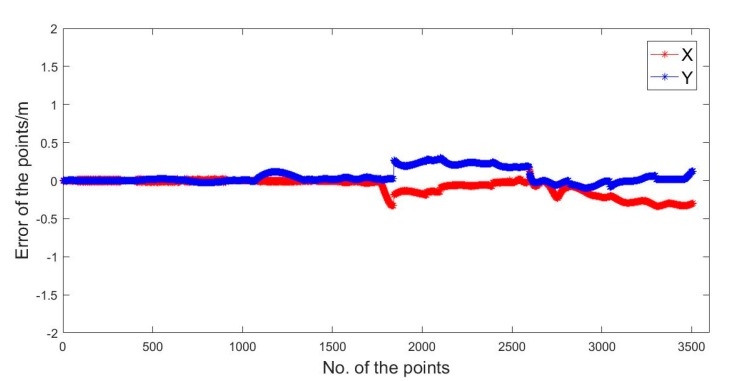
This paper proposes a method for determining a pedestrian's indoor location based on an UWB (ultra-wideband) and vison fusion algorithm. Firstly, an UWB localization algorithm based on EKF (extended Kalman filter) is proposed, which can achieve indoor positioning accuracy of 0.3 m. Secondly, a method to solve scale ambiguity and repositioning of the monocular ORB-SLAM (oriented fast and rotated brief-simultaneous localization and mapping) algorithm based on EKF is proposed, which can calculate the ambiguity in real time and can quickly reposition when the vision track fails. Lastly, two experiments were carried out, one in a corridor with sparse texture and the other with the light brightness changing frequently. The results show that the proposed scheme can reliably achieve positioning accuracy on the order of 0.2 m; with the combination of algorithms, the scale ambiguity of monocular ORB-Slam can be solved, with the failed vision trace repositioned by UWB, and the positioning accuracy of UWB can be improved, making it suitable for pedestrian location in indoor environments with sparse texture and frequent light brightness changes.
本文提出了一种基于超宽带(UWB)与视觉融合算法确定行人室内位置的方法。首先,提出了一种基于扩展卡尔曼滤波器(EKF)的UWB定位算法,其室内定位精度可达0.3米。其次,提出了一种基于EKF解决单目ORB-SLAM(定向快速和旋转简要-同时定位与地图构建)算法的尺度模糊和重新定位问题的方法,该方法能够实时计算模糊度,并且在视觉跟踪失败时能够快速重新定位。最后,进行了两项实验,一项在纹理稀疏的走廊中进行,另一项在光照亮度频繁变化的环境中进行。结果表明,所提出的方案能够可靠地实现约0.2米的定位精度;通过算法组合,可以解决单目ORB-Slam的尺度模糊问题,利用UWB对失败的视觉轨迹进行重新定位,并提高UWB的定位精度,使其适用于纹理稀疏和光照亮度频繁变化的室内环境中的行人定位。