Kim Euisun, Meinhold Waiman, Shinohara Minoru, Ueda Jun
Bio-Robotics and Human Modeling Laboratory, G.W.W. School of Mechanical Engineering, Georgia Institute of Technology, Atlanta, GA, United States.
Human Neuromuscular Physiology Laboratory, School of Biological Sciences, Georgia Institute of Technology, Atlanta, GA, United States.
Front Neurorobot. 2020 Feb 3;14:1. doi: 10.3389/fnbot.2020.00001. eCollection 2020.
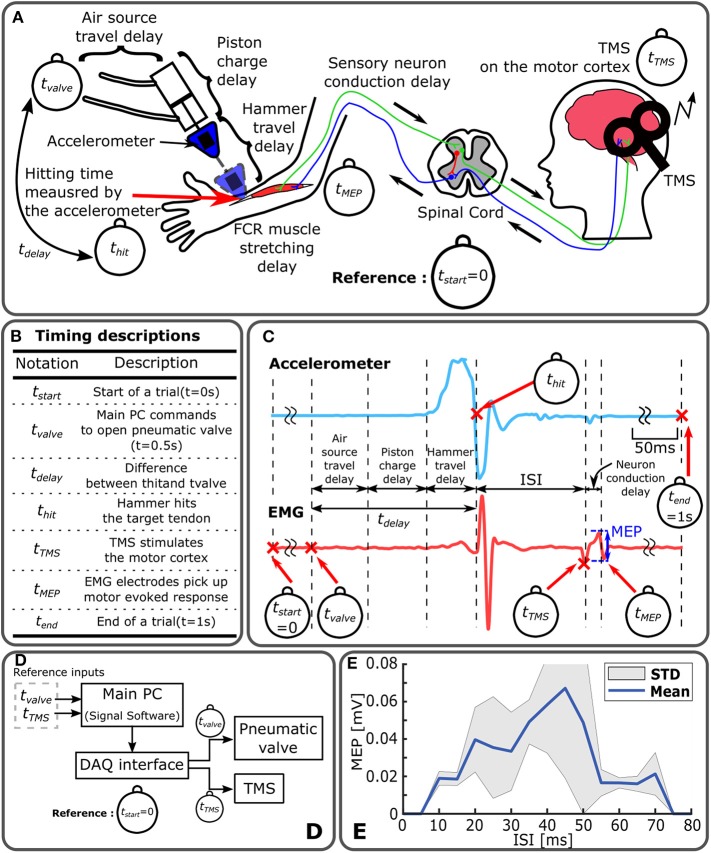
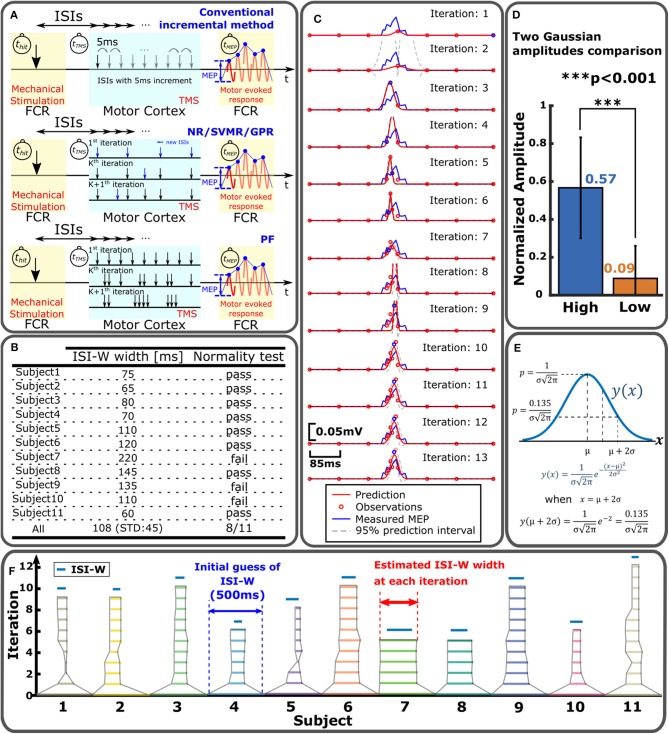
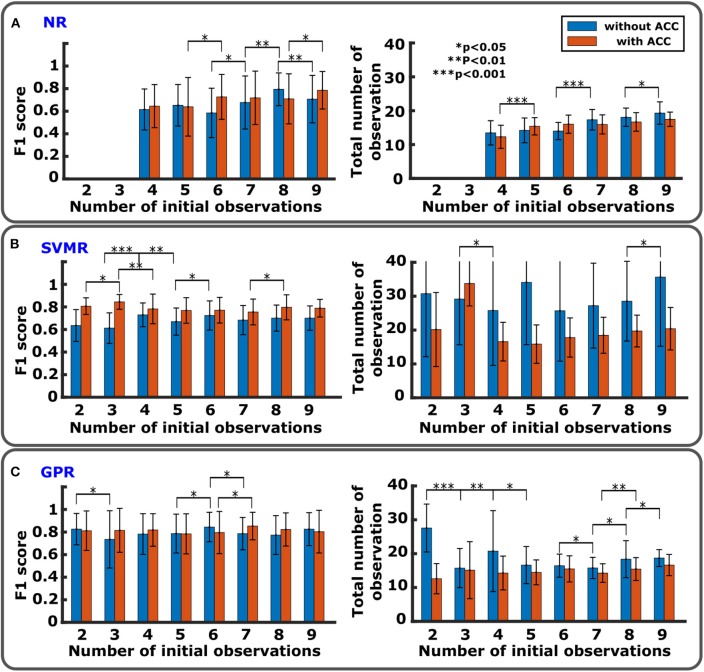
For achieving motor recovery in individuals with sensorimotor deficits, augmented activation of the appropriate sensorimotor system, and facilitated induction of neural plasticity are essential. An emerging procedure that combines peripheral nerve stimulation and its associative stimulation with central brain stimulation is known to enhance the excitability of the motor cortex. In order to effectively apply this paired stimulation technique, timing between central and peripheral stimuli must be individually adjusted. There is a small range of effective timings between two stimuli, or the inter-stimulus interval window (ISI-W). Properties of ISI-W from neuromodulation in response to mechanical stimulation (Mstim) of muscles have been understudied because of the absence of a versatile and reliable mechanical stimulator. This paper adopted a combination of transcranial magnetic stimulation (TMS) and Mstim by using a high-precision robotic mechanical stimulator. A pneumatically operated robotic tendon tapping device was applied. A low-friction linear cylinder achieved high stimulation precision in time and low electromagnetic artifacts in physiological measurements. This paper describes a procedure to effectively estimate an individual ISI-W from the transiently enhanced motor evoked potential (MEP) with a reduced number of paired Mstim and sub-threshold TMS trials by applying statistical sampling and regression technique. This paper applied a total of four parametric and non-parametric statistical regression methods for ISI-W estimation. The developed procedure helps to reduce time for individually adjusting effective ISI, reducing physical burden on the subject.
对于患有感觉运动缺陷的个体实现运动恢复,增强适当的感觉运动系统激活以及促进神经可塑性的诱导至关重要。一种将周围神经刺激及其联合刺激与中枢脑刺激相结合的新兴程序已知可增强运动皮层的兴奋性。为了有效应用这种配对刺激技术,必须对中枢和周围刺激之间的时间进行个体调整。两种刺激之间存在一个小的有效时间范围,即刺激间隔窗口(ISI-W)。由于缺乏通用且可靠的机械刺激器,对因肌肉机械刺激(Mstim)引起的神经调节中ISI-W的特性研究不足。本文采用高精度机器人机械刺激器,将经颅磁刺激(TMS)和Mstim相结合。应用了一种气动操作的机器人肌腱敲击装置。低摩擦线性气缸在时间上实现了高刺激精度,并且在生理测量中产生的电磁伪影较少。本文描述了一种通过应用统计采样和回归技术,从具有减少数量的配对Mstim和阈下TMS试验的瞬态增强运动诱发电位(MEP)中有效估计个体ISI-W的程序。本文总共应用了四种参数和非参数统计回归方法进行ISI-W估计。所开发的程序有助于减少个体调整有效ISI的时间,减轻受试者的身体负担。