Campisano Federico, Remirez Andria A, Caló Simone, Chandler James H, Obstein Keith L, Webster Robert J, Valdastri Pietro
Science and Technology of Robotics in Medicine (STORM) Laboratory, Department of Mechanical Engineering, Vanderbilt University, Nashville, TN, USA.
Medical Engineering and Discovery (MED) Laboratory, Department of Mechanical Engineering, Vanderbilt University, Nashville, TN, USA.
IEEE Robot Autom Lett. 2020 Apr;5(2):2642-2649. doi: 10.1109/lra.2020.2972880. Epub 2020 Feb 10.
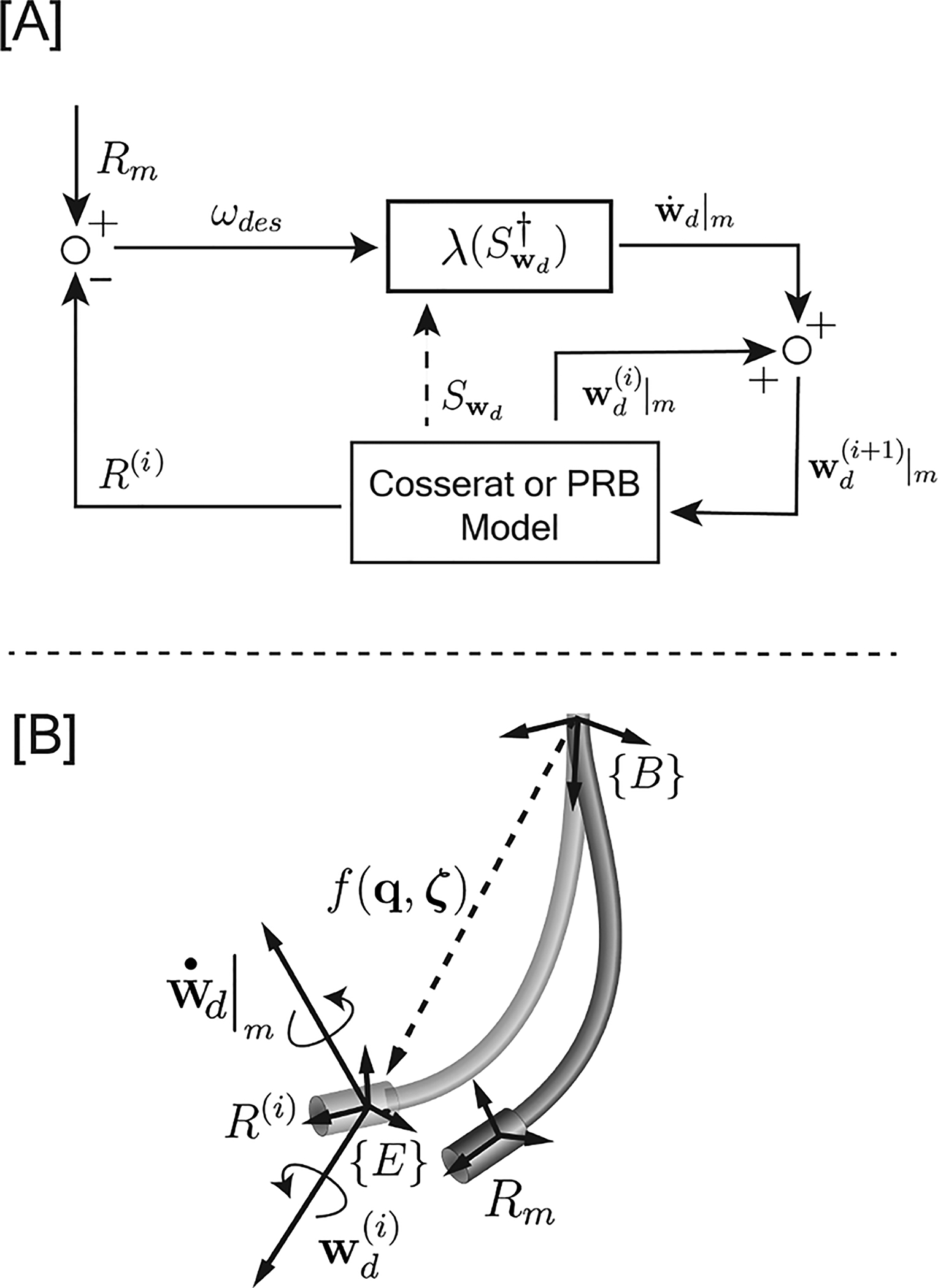
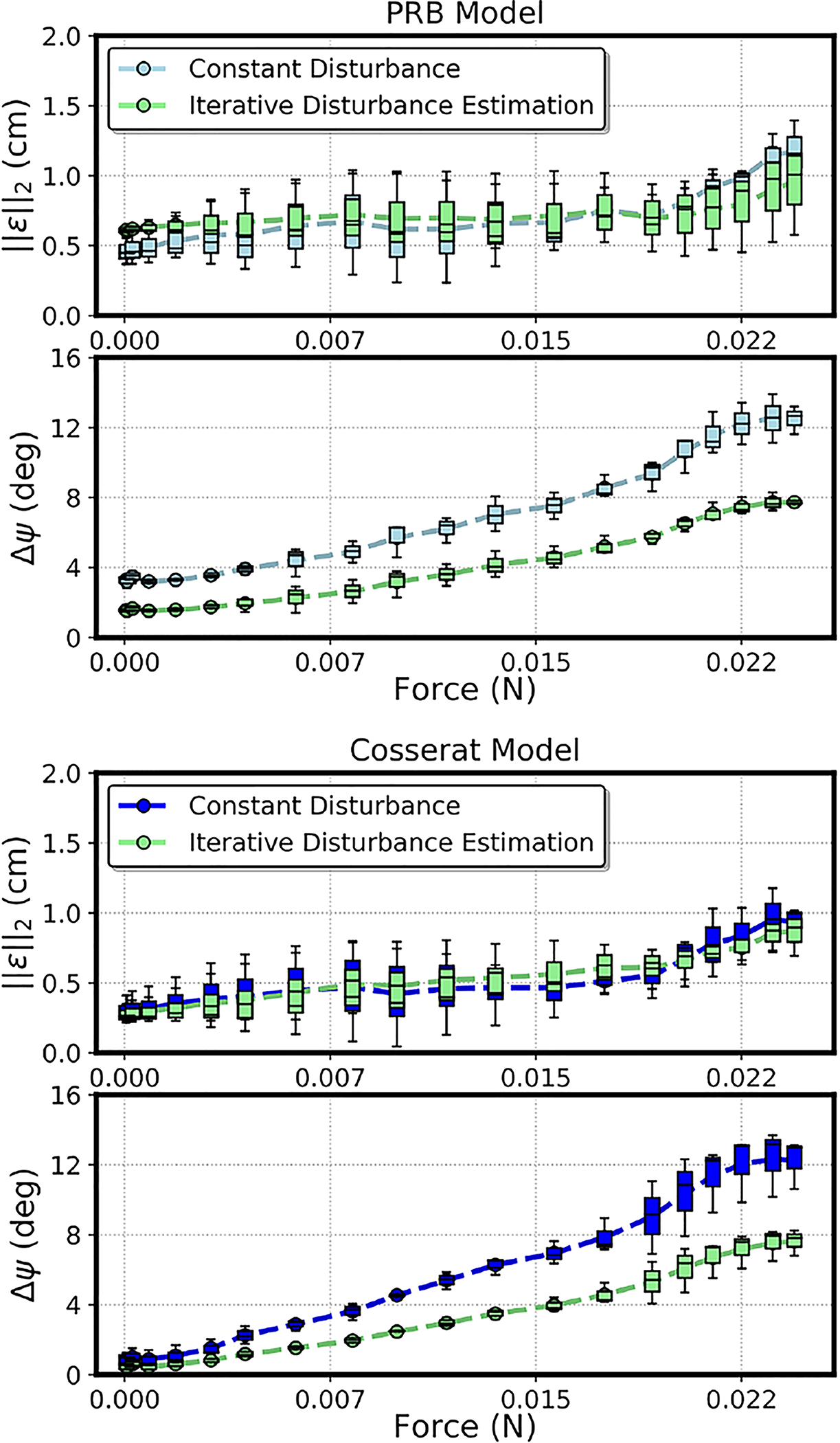
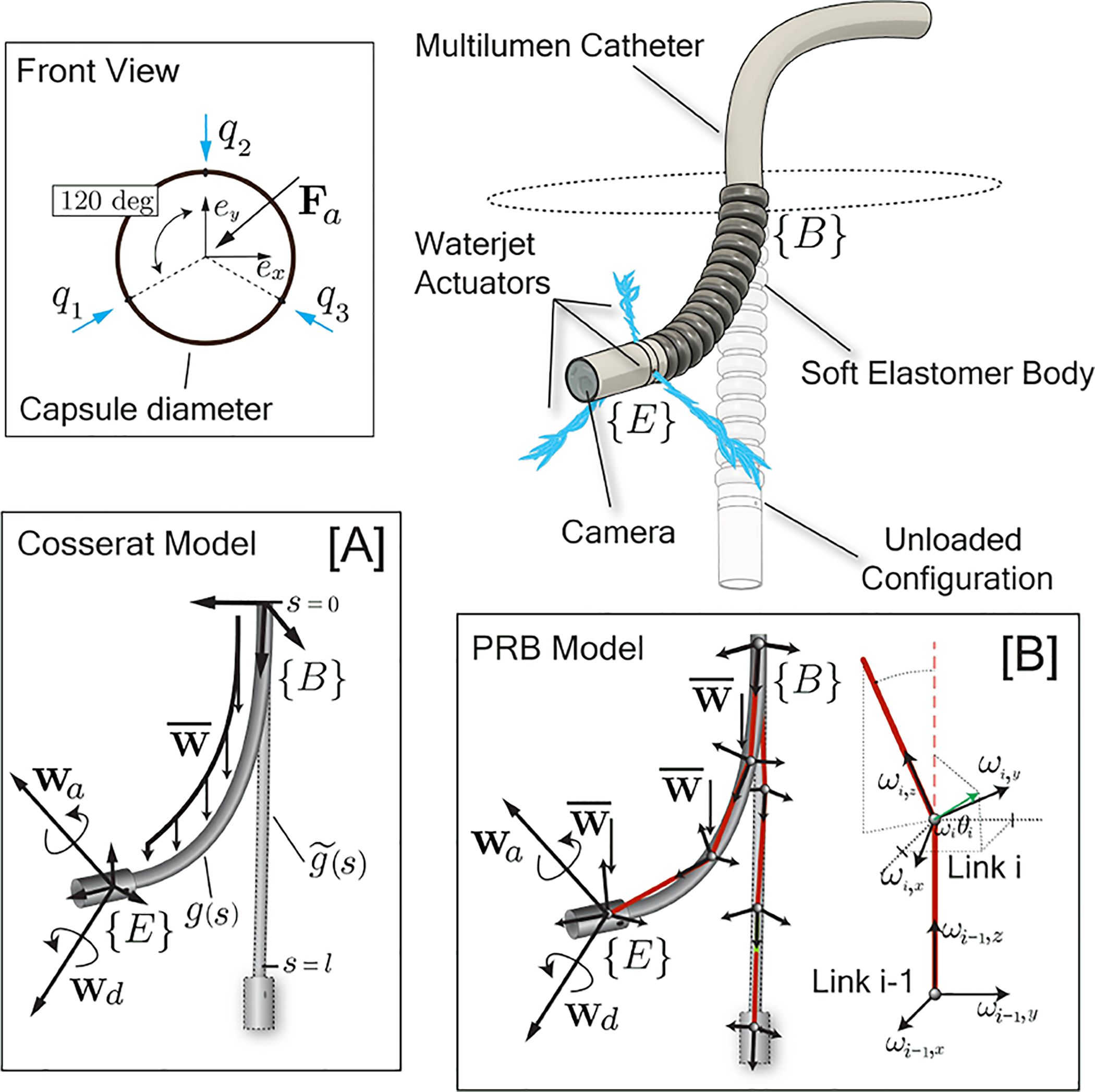
Continuum manipulators are flexible robots which undergo continuous deformation as they are actuated. To describe the elastic deformation of such robots, kinematic models have been developed and successfully applied to a large variety of designs and to various levels of constitutive stiffness. Independent of the design, kinematic models need to be calibrated to best describe the deformation of the manipulator. However, even after calibration, unmodeled effects such as friction, nonlinear elastic and/or spatially varying material properties as well as manufacturing imprecision reduce the accuracy of these models. In this paper, we present a method for improving the accuracy of kinematic models of continuum manipulators through the incorporation of orientation sensor feedback. We achieve this through the use of a "disturbance wrench", which is used to compensate for these unmodeled effects, and is continuously estimated based on orientation sensor feedback as the robot moves through its workspace. The presented method is applied to the HydroJet, a waterjet-actuated soft continuum manipulator, and shows an average of 40% reduction in root mean square position and orientation error in the two most common types of kinematic models for continuum manipulators, a Cosserat rod model and a pseudo-rigid body model.
连续体机器人是一种柔性机器人,在驱动时会发生连续变形。为了描述此类机器人的弹性变形,已经开发了运动学模型,并成功应用于多种设计以及不同程度的本构刚度。与设计无关,运动学模型需要进行校准,以最佳地描述机器人的变形。然而,即使在校准之后,诸如摩擦、非线性弹性和/或空间变化的材料特性以及制造不精确性等未建模效应也会降低这些模型的准确性。在本文中,我们提出了一种通过纳入方向传感器反馈来提高连续体机器人运动学模型准确性的方法。我们通过使用“干扰扳手”来实现这一点,该“干扰扳手”用于补偿这些未建模效应,并在机器人在其工作空间中移动时基于方向传感器反馈进行连续估计。所提出的方法应用于水射流驱动的软连续体机器人HydroJet,在连续体机器人的两种最常见运动学模型——柯塞尔杆模型和伪刚体模型中,均显示出平均均方根位置和方向误差降低了40%。