Greigarn Tipakorn, Çavuşoğlu M Cenk
Department of Electrical Engineering and Computer Science, Case Western Reserve University, Cleveland, OH. They can be reached via email at
IEEE Int Conf Robot Autom. 2015 May;2015:2263-2243. doi: 10.1109/ICRA.2015.7139495.
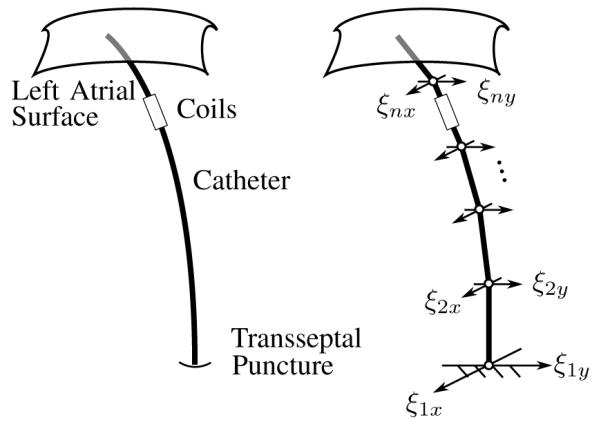
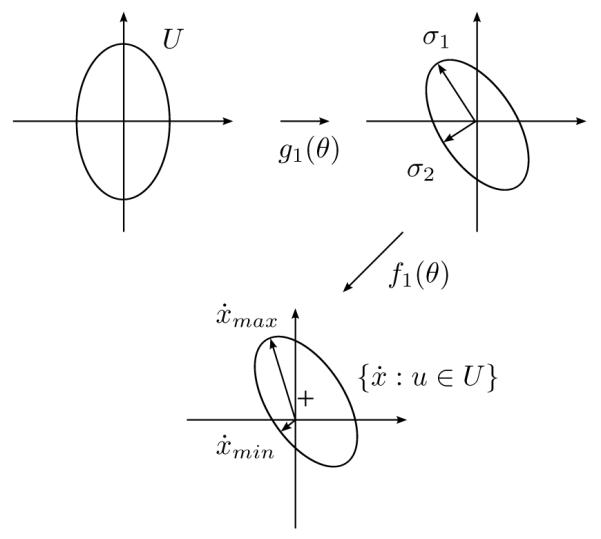
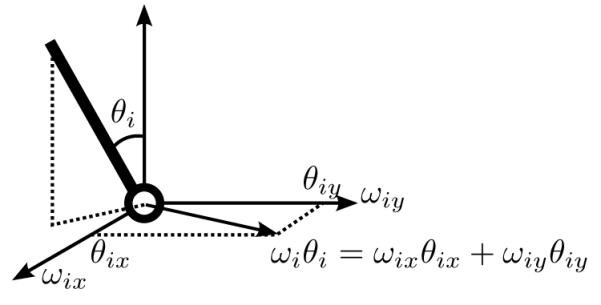
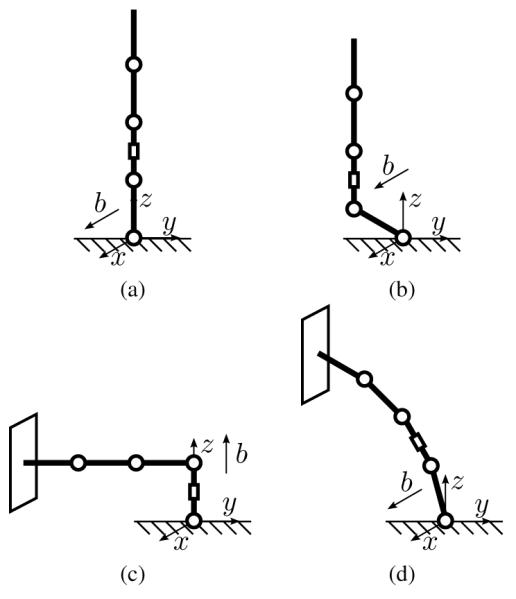
This paper presents a kinematic study of a pseudorigid-body model (PRBM) of MRI-compatible, magnetically actuated, steerable catheters. It includes a derivation of a mathematical model of the PRBM of the catheter, singularity studies of the model, and a new manipulability measure. While the forward kinematics of the model presented here is applicable to PRBMs for other applications, actuation method is unique to the particular design. Hence, a careful study of singularities and manipulability of the model is required. The singularities are studied from the underlying equations of motion with intuitive interpretations. The proposed manipulability measure is a generalization of the inverse condition number manipulability measure of robotic manipulators. While the PRBM is an approximation of the flexible catheter, kinematic studies of the PRBM still provide some insight into feasibility and limitations of the catheter, which is beneficial to the design and motion planning of the catheter.
本文介绍了一种用于磁共振成像兼容、磁驱动、可转向导管的伪刚体模型(PRBM)的运动学研究。它包括导管PRBM数学模型的推导、模型的奇异性研究以及一种新的可操作性度量。虽然这里提出的模型的正向运动学适用于其他应用的PRBM,但驱动方法对于特定设计是独特的。因此,需要仔细研究模型的奇异性和可操作性。从具有直观解释的基础运动方程研究奇异性。所提出的可操作性度量是机器人操纵器的逆条件数可操作性度量的推广。虽然PRBM是柔性导管的近似,但PRBM的运动学研究仍然为导管的可行性和局限性提供了一些见解,这有利于导管的设计和运动规划。