Campisano Federico, Caló Simone, Remirez Andria A, Chandler James H, Obstein Keith L, Webster Robert J, Valdastri Pietro
Science and Technology of Robotics in Medicine (STORM) Laboratory, Department of Mechanical Engineering, Vanderbilt University, Nashville, TN, USA.
Science and Technology of Robotics in Medicine (STORM) Laboratory UK, School of Electronic and Electrical Engineering, University of Leeds, Leeds, UK.
Int J Rob Res. 2021 Jun 1;40(6-7):923-938. doi: 10.1177/0278364921997167. Epub 2021 Mar 15.
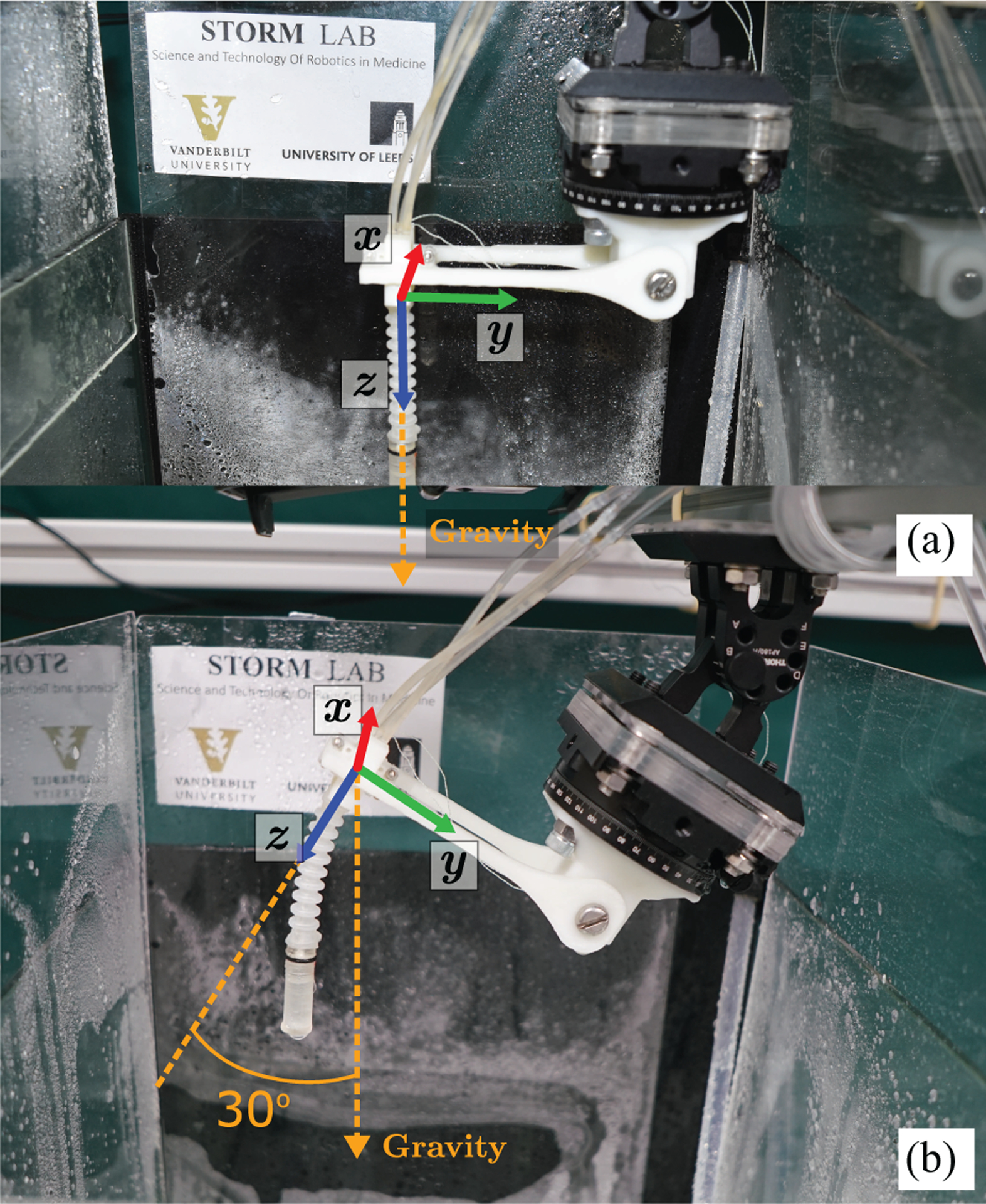
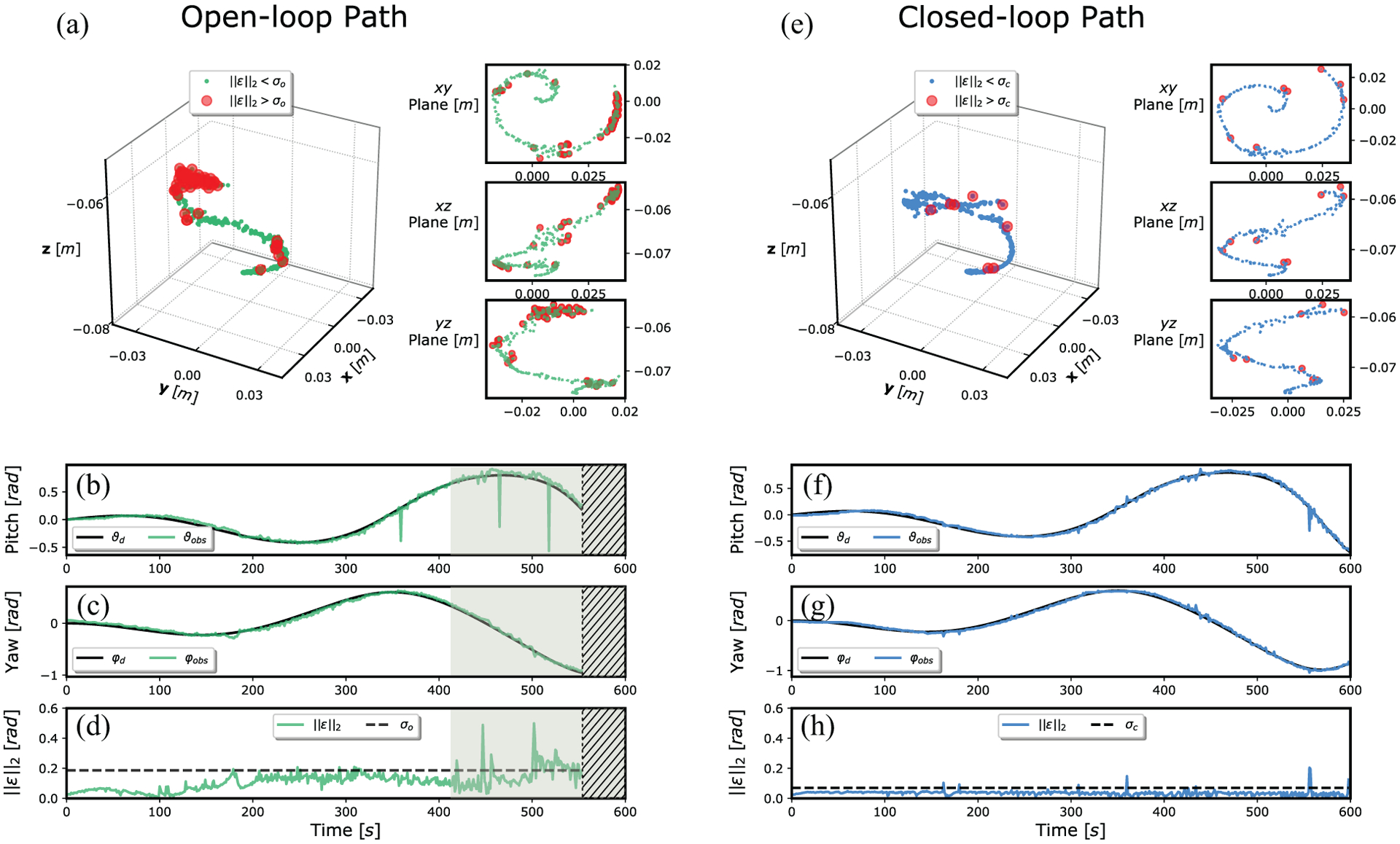
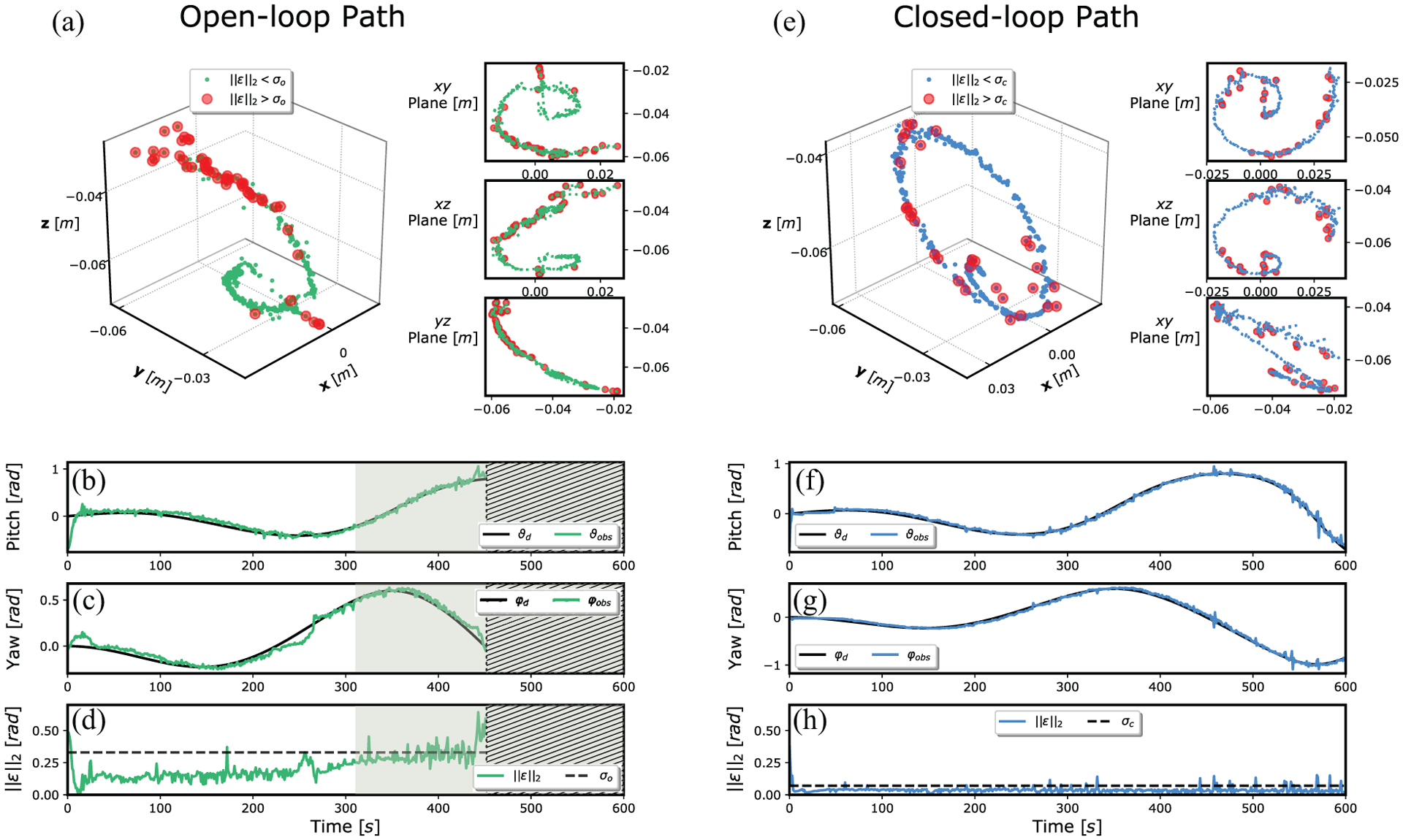
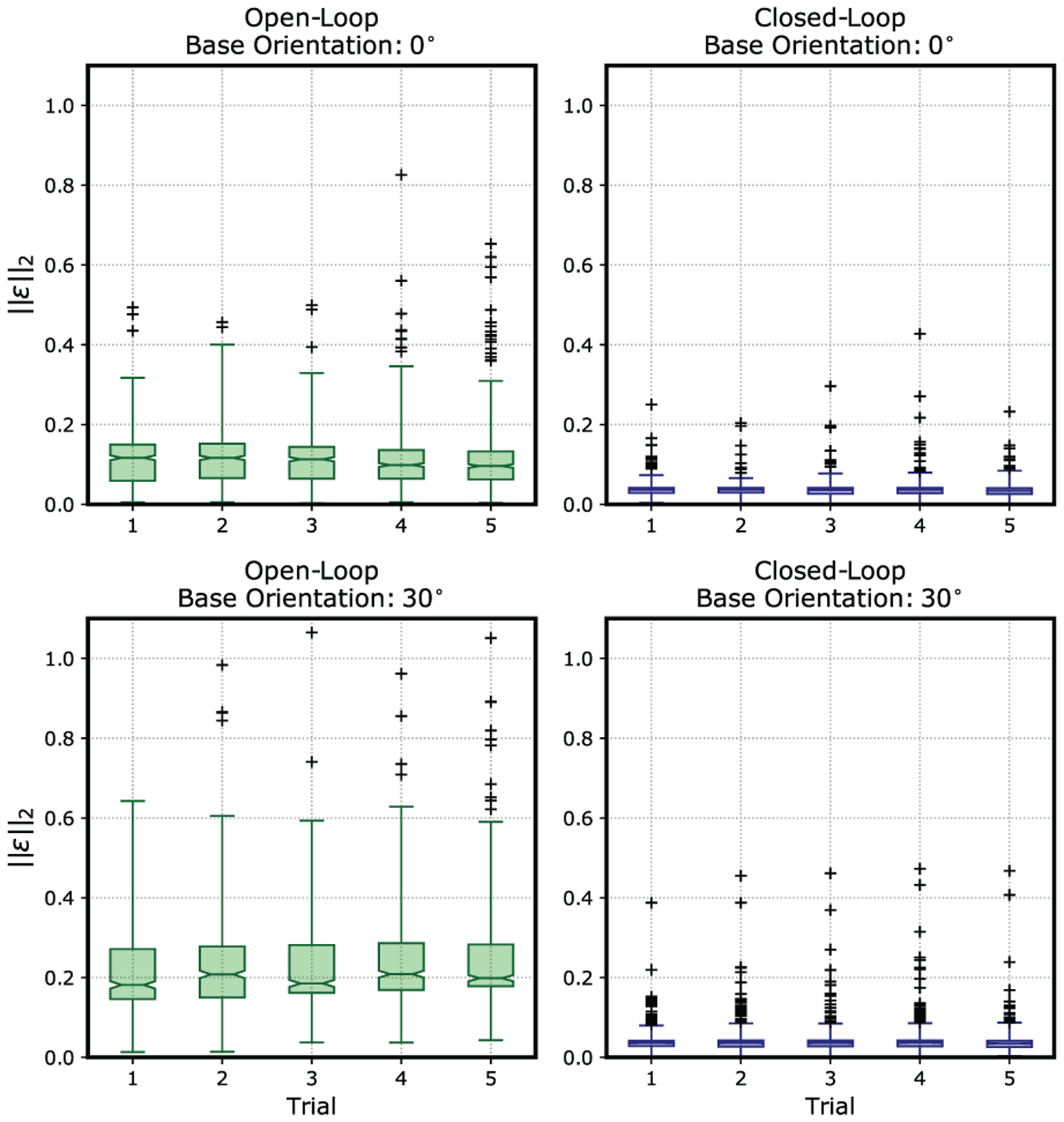
Continuum manipulators, inspired by nature, have drawn significant interest within the robotics community. They can facilitate motion within complex environments where traditional rigid robots may be ineffective, while maintaining a reasonable degree of precision. Soft continuum manipulators have emerged as a growing subfield of continuum robotics, with promise for applications requiring high compliance, including certain medical procedures. This has driven demand for new control schemes designed to precisely control these highly flexible manipulators, whose kinematics may be sensitive to external loads, such as gravity. This article presents one such approach, utilizing a rapidly computed kinematic model based on Cosserat rod theory, coupled with sensor feedback to facilitate closed-loop control, for a soft continuum manipulator under tip follower actuation and external loading. This approach is suited to soft manipulators undergoing quasi-static deployment, where actuators apply a follower wrench (i.e., one that is in a constant body frame direction regardless of robot configuration) anywhere along the continuum structure, as can be done in water-jet propulsion. In this article we apply the framework specifically to a tip actuated soft continuum manipulator. The proposed control scheme employs both actuator feedback and pose feedback. The actuator feedback is utilized to both regulate the follower load and to compensate for non-linearities of the actuation system that can introduce kinematic model error. Pose feedback is required to maintain accurate path following. Experimental results demonstrate successful path following with the closed-loop control scheme, with significant performance improvements gained through the use of sensor feedback when compared with the open-loop case.
受自然启发的连续体机器人在机器人领域引起了广泛关注。它们能够在传统刚性机器人可能无效的复杂环境中实现灵活运动,同时保持合理的精度。软连续体机器人已成为连续体机器人领域中一个不断发展的子领域,有望应用于需要高柔顺性的场景,包括某些医疗手术。这推动了对新控制方案的需求,这些方案旨在精确控制这些高度灵活的机器人,其运动学可能对诸如重力等外部负载敏感。本文提出了一种这样的方法,即利用基于柯塞尔杆理论快速计算的运动学模型,并结合传感器反馈以实现闭环控制,用于在末端跟随驱动和外部负载下的软连续体机器人。这种方法适用于经历准静态展开的软机器人,其中致动器在连续体结构的任何位置施加跟随扳手(即,无论机器人配置如何,其方向在固定的体坐标系中保持不变),就像在喷水推进中那样。在本文中,我们将该框架具体应用于末端驱动的软连续体机器人。所提出的控制方案同时采用了致动器反馈和位姿反馈。致动器反馈用于调节跟随负载并补偿可能引入运动学模型误差的致动系统非线性。位姿反馈用于保持精确的路径跟踪。实验结果表明,闭环控制方案成功实现了路径跟踪,与开环情况相比,通过使用传感器反馈显著提高了性能。