Military University of Technology, ul. gen. S. Kaliskiego 2, 00-908 Warszawa, Poland.
Sensors (Basel). 2020 Mar 12;20(6):1584. doi: 10.3390/s20061584.
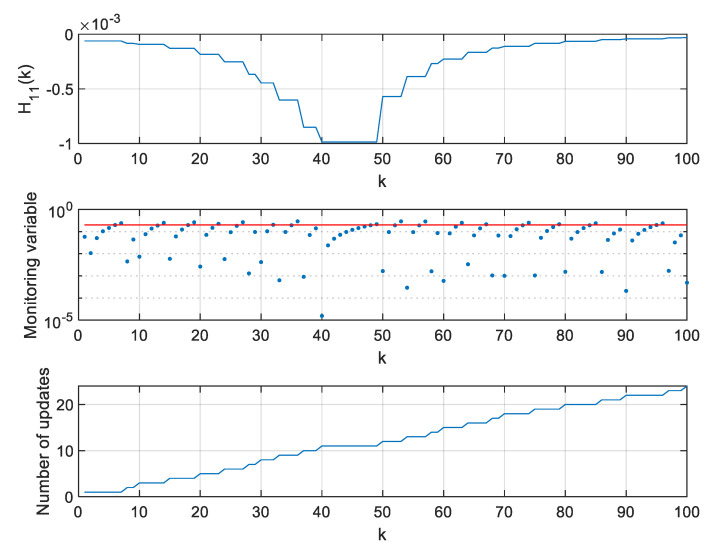
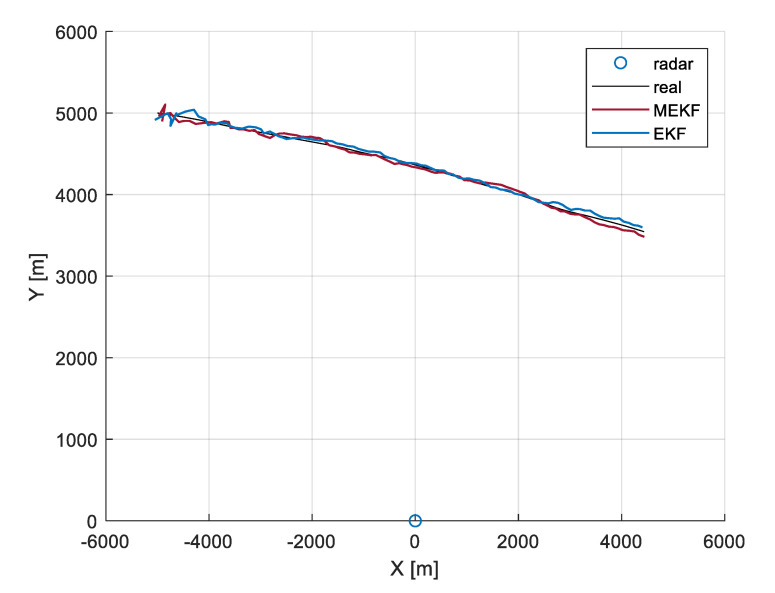
The paper presents a method of computational complexity reduction in Extended Kalman Filters dedicated for systems with non-linear measurement models. Extended Kalman filters are commonly used in radio-location and radio-navigation for estimating an object's position and other parameters of motion, based on measurements, which are non-linearly related to the object's position. This non-linearity forces designers to use non-linear filters, such as the Extended Kalman Filter mentioned, where linearization of the system's model is performed in every run of the filter's loop. The linearization, consisting of calculating Jacobian matrices for non-linear functions in the dynamics and/or observation models, significantly increases the number of operations in comparison to the linear Kalman filter. The method proposed in this paper consists of analyzing a variability of Jacobians and performing the model linearization only when expected changes of those Jacobians exceed a preset threshold. With a properly chosen threshold value, the proposed filter modification leads to a significant reduction of its computational burden and does not noticeably increase its estimation errors. The paper describes a practical simulation-based method of determining the threshold. The accuracy of the filter for various threshold values was tested for simplified models of radar systems.
本文提出了一种用于非线性测量模型系统的扩展卡尔曼滤波器计算复杂度降低的方法。扩展卡尔曼滤波器通常用于无线电定位和无线电导航,用于根据与物体位置非线性相关的测量值来估计物体的位置和其他运动参数。这种非线性迫使设计者使用非线性滤波器,如文中提到的扩展卡尔曼滤波器,其中在滤波器循环的每次运行中都对系统模型进行线性化。线性化包括为动态和/或观测模型中的非线性函数计算雅可比矩阵,与线性卡尔曼滤波器相比,这会显著增加运算次数。本文提出的方法包括分析雅可比矩阵的可变性,并仅在预期雅可比矩阵变化超过预设阈值时执行模型线性化。通过选择适当的阈值,所提出的滤波器修改可以显著降低其计算负担,并且不会明显增加其估计误差。本文描述了一种基于实际仿真的确定阈值的方法。针对简化的雷达系统模型测试了各种阈值下滤波器的精度。