Facultad de Ingeniería, Universidad Nacional de Asunción, 2160 San Lorenzo, Paraguay.
Universidad de Sevilla, 41004 Sevilla, Espana.
Sensors (Basel). 2020 Mar 9;20(5):1488. doi: 10.3390/s20051488.
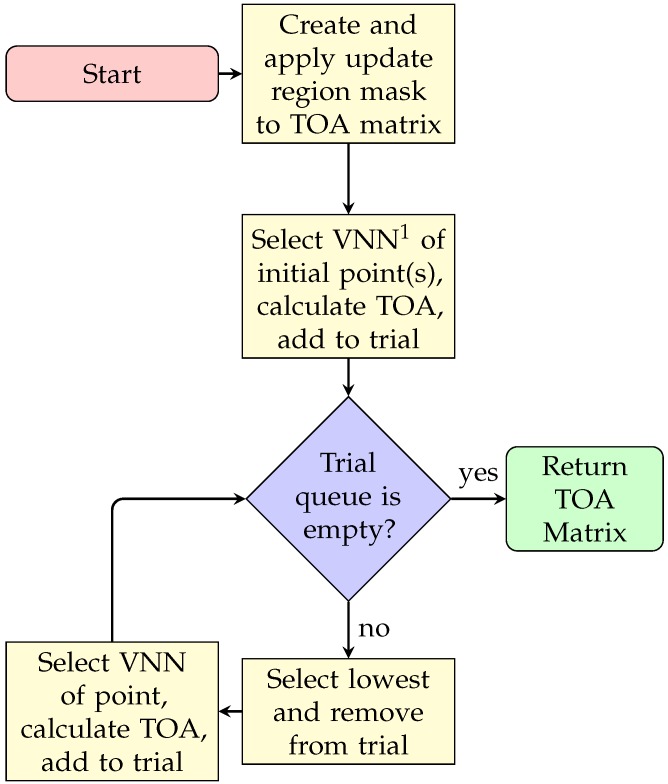
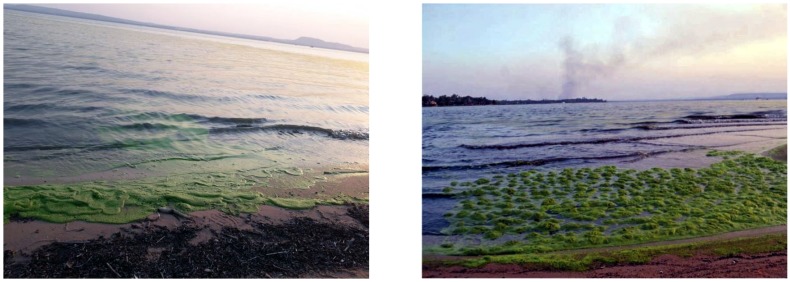
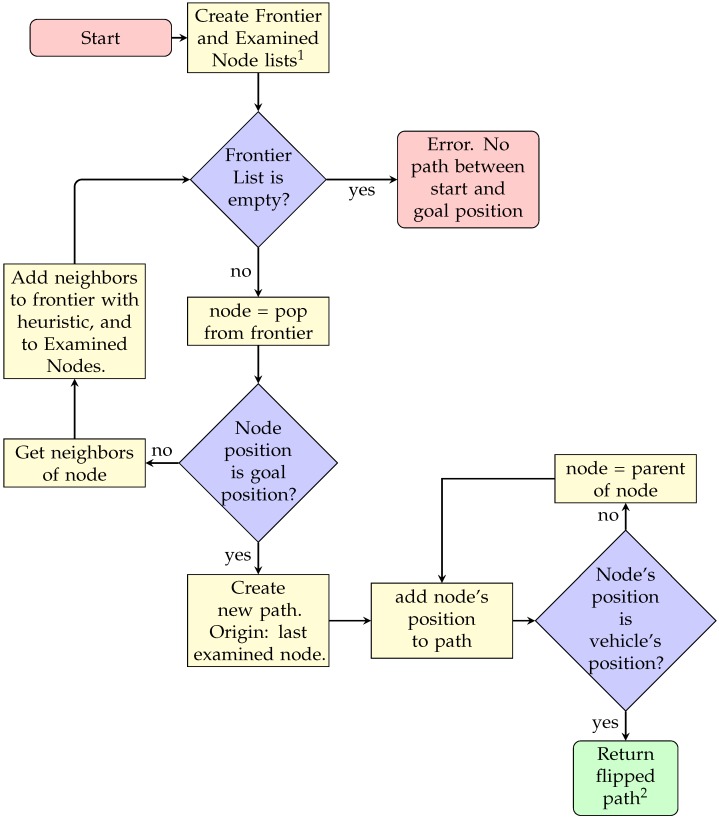
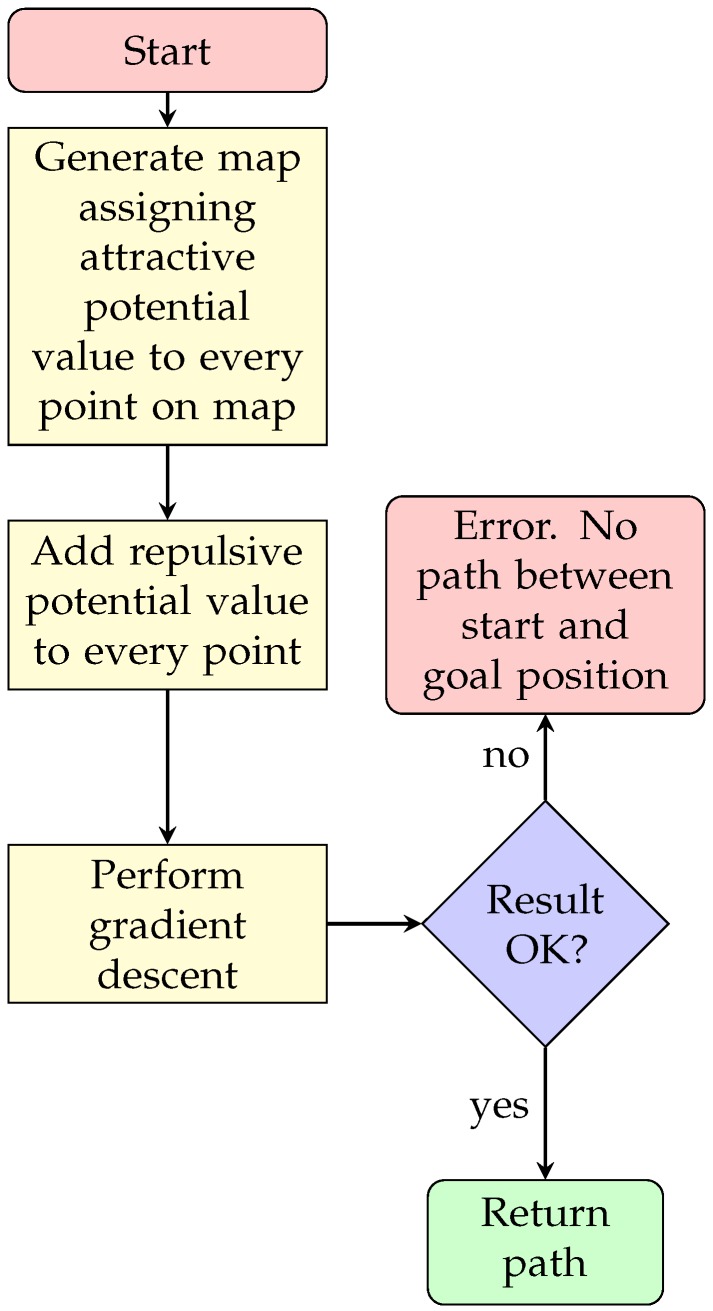
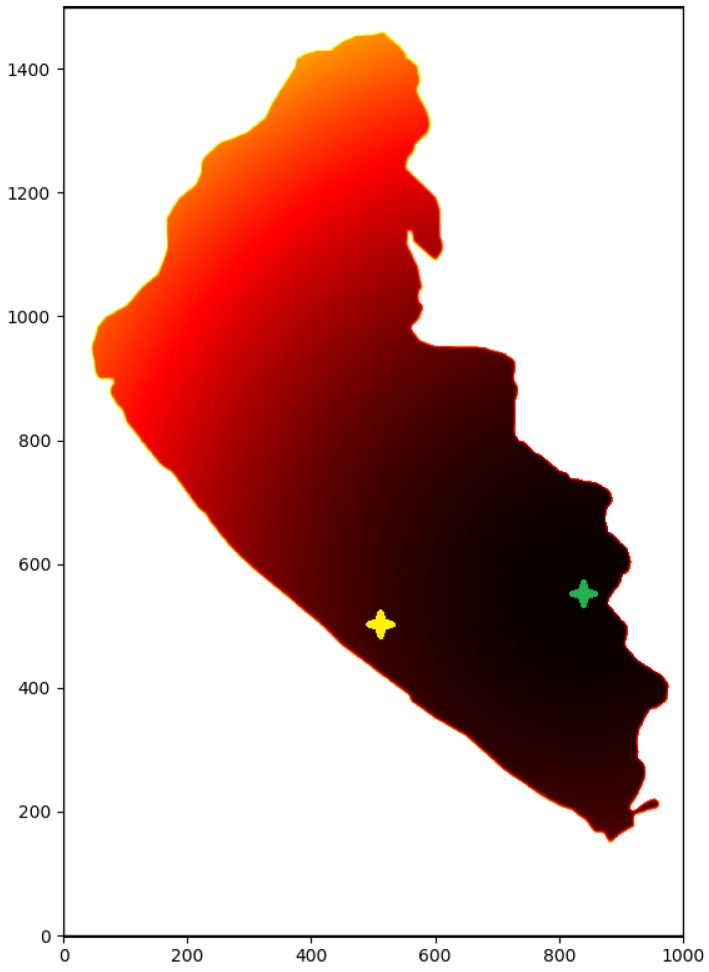
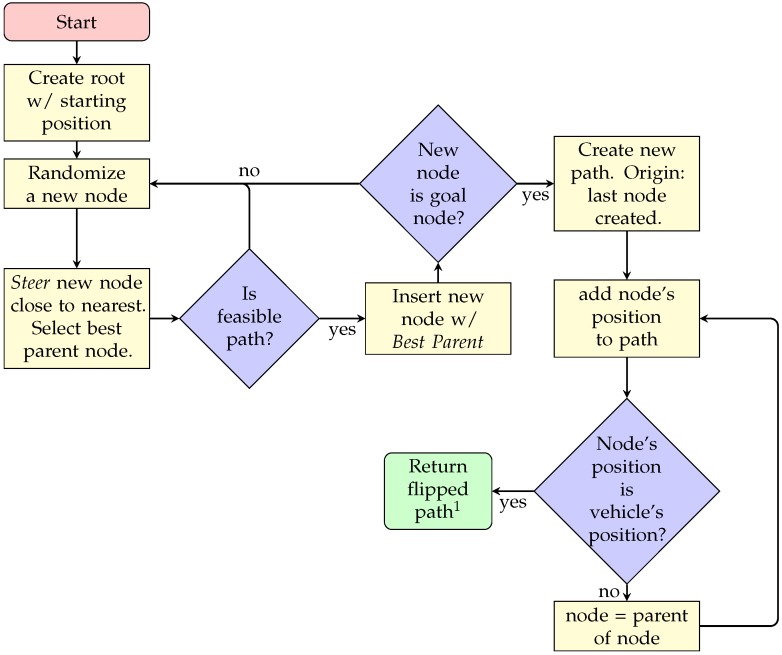
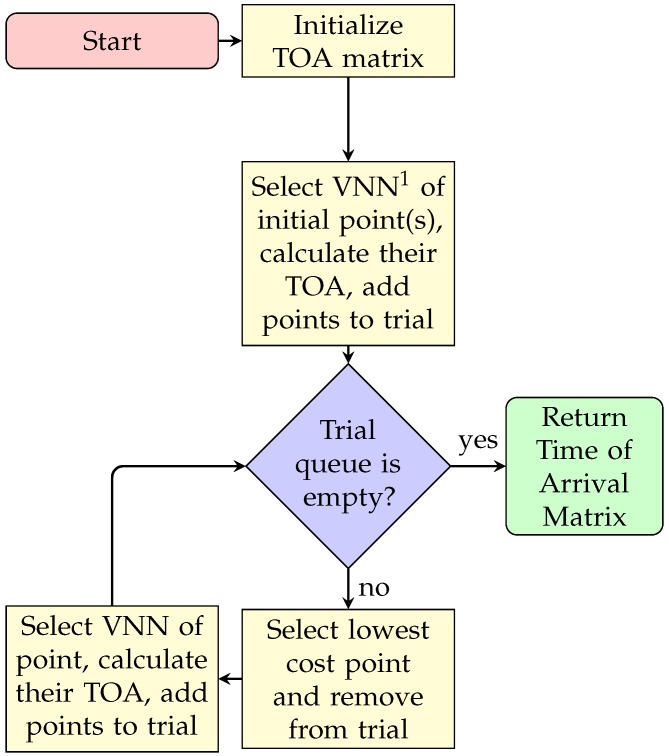
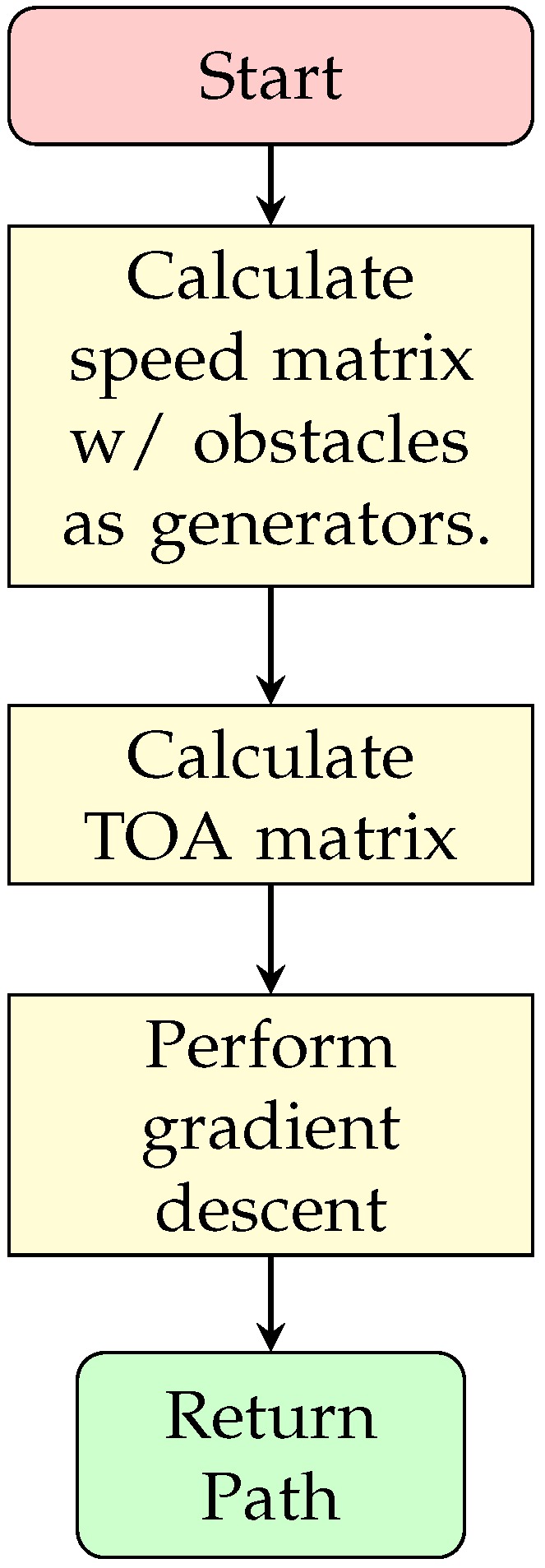
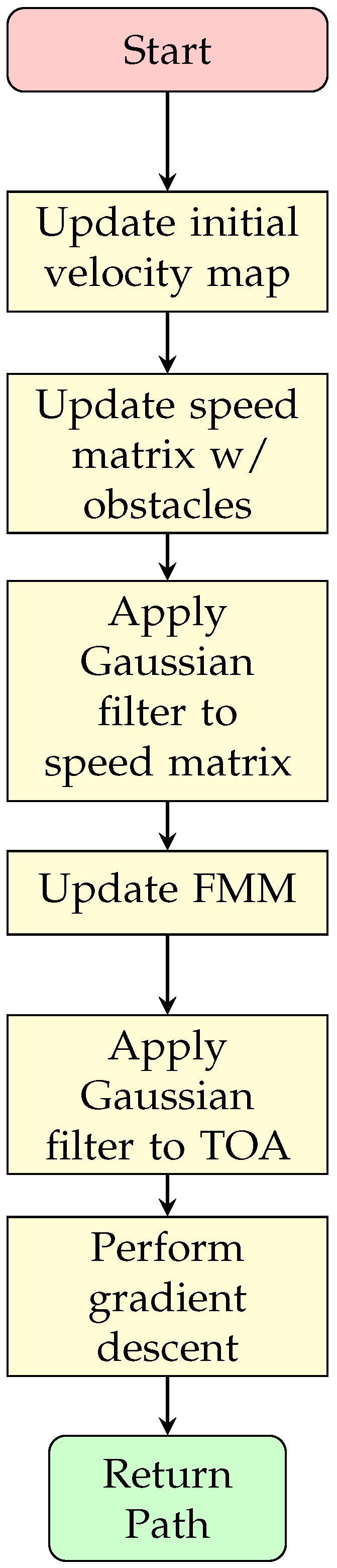
Local path planning is important in the development of autonomous vehicles since it allows a vehicle to adapt their movements to dynamic environments, for instance, when obstacles are detected. This work presents an evaluation of the performance of different local path planning techniques for an Autonomous Surface Vehicle, using a custom-made simulator based on the open-source Robotarium framework. The conducted simulations allow to verify, compare and visualize the solutions of the different techniques. The selected techniques for evaluation include A*, Potential Fields (PF), Rapidly-Exploring Random Trees* (RRT*) and variations of the Fast Marching Method (FMM), along with a proposed new method called Updating the Fast Marching Square method (uFMS). The evaluation proposed in this work includes ways to summarize time and safety measures for local path planning techniques. The results in a Lake environment present the advantages and disadvantages of using each technique. The proposed uFMS and A* have been shown to achieve interesting performance in terms of processing time, distance travelled and security levels. Furthermore, the proposed uFMS algorithm is capable of generating smoother routes.
局部路径规划在自动驾驶汽车的发展中非常重要,因为它允许车辆根据动态环境调整行驶路线,例如,当检测到障碍物时。本工作使用基于开源 Robotarium 框架的定制模拟器,对自主水面车辆的不同局部路径规划技术的性能进行了评估。所进行的模拟允许验证、比较和可视化不同技术的解决方案。选择用于评估的技术包括 A*、势场 (PF)、快速探索随机树* (RRT*) 和快速行进方法 (FMM) 的变体,以及一种称为更新快速行进方方法 (uFMS) 的新方法。这项工作提出的评估方法包括总结局部路径规划技术的时间和安全措施的方法。在湖泊环境中的结果展示了每种技术的优缺点。所提出的 uFMS 和 A* 在处理时间、行驶距离和安全水平方面表现出了有趣的性能。此外,所提出的 uFMS 算法能够生成更平滑的路线。