Department. of Computer Science and Biomedical Informatics, University of Thessaly, 35131 Lamia, Greece.
Sensors (Basel). 2020 Apr 22;20(8):2385. doi: 10.3390/s20082385.
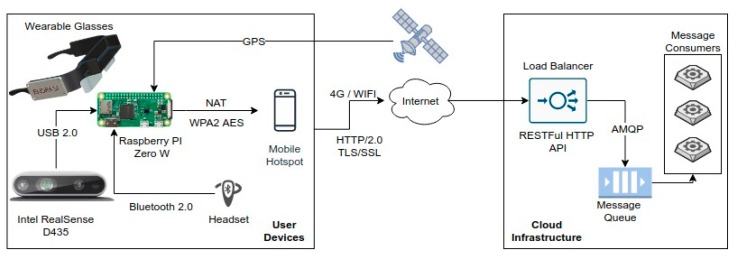
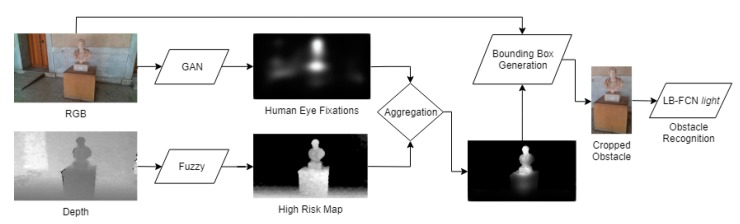
Every day, visually challenged people (VCP) face mobility restrictions and accessibility limitations. A short walk to a nearby destination, which for other individuals is taken for granted, becomes a challenge. To tackle this problem, we propose a novel visual perception system for outdoor navigation that can be evolved into an everyday visual aid for VCP. The proposed methodology is integrated in a wearable visual perception system (VPS). The proposed approach efficiently incorporates deep learning, object recognition models, along with an obstacle detection methodology based on human eye fixation prediction using Generative Adversarial Networks. An uncertainty-aware modeling of the obstacle risk assessment and spatial localization has been employed, following a fuzzy logic approach, for robust obstacle detection. The above combination can translate the position and the type of detected obstacles into descriptive linguistic expressions, allowing the users to easily understand their location in the environment and avoid them. The performance and capabilities of the proposed method are investigated in the context of safe navigation of VCP in outdoor environments of cultural interest through obstacle recognition and detection. Additionally, a comparison between the proposed system and relevant state-of-the-art systems for the safe navigation of VCP, focused on design and user-requirements satisfaction, is performed.
每天,视障人士(VCP)都面临着行动受限和无障碍通行的限制。对于其他人来说,步行到附近的目的地是理所当然的事情,但对于视障人士来说,这却成了一个挑战。为了解决这个问题,我们提出了一种新颖的户外导航视觉感知系统,可以将其发展成为视障人士的日常视觉辅助工具。所提出的方法被集成到一个可穿戴的视觉感知系统(VPS)中。该方法高效地结合了深度学习、物体识别模型,以及基于生成对抗网络的人眼注视预测的障碍物检测方法。采用模糊逻辑方法对障碍物风险评估和空间定位进行了不确定建模,以实现稳健的障碍物检测。上述组合可以将检测到的障碍物的位置和类型转换为描述性语言表达,使用户可以轻松了解其在环境中的位置并避开它们。通过障碍物识别和检测,研究了所提出的方法在文化兴趣户外环境中 VCP 安全导航方面的性能和能力。此外,还针对 VCP 的安全导航,从设计和用户需求满足的角度,对所提出的系统与相关最先进系统进行了比较。