Kerzel Matthias, Pekarek-Rosin Theresa, Strahl Erik, Heinrich Stefan, Wermter Stefan
Knowledge Technology, Department of Informatics, University of Hamburg, Hamburg, Germany.
Front Neurorobot. 2020 Jun 9;14:28. doi: 10.3389/fnbot.2020.00028. eCollection 2020.
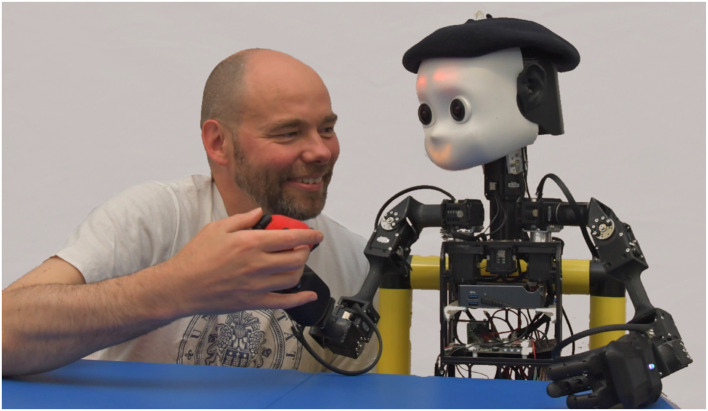
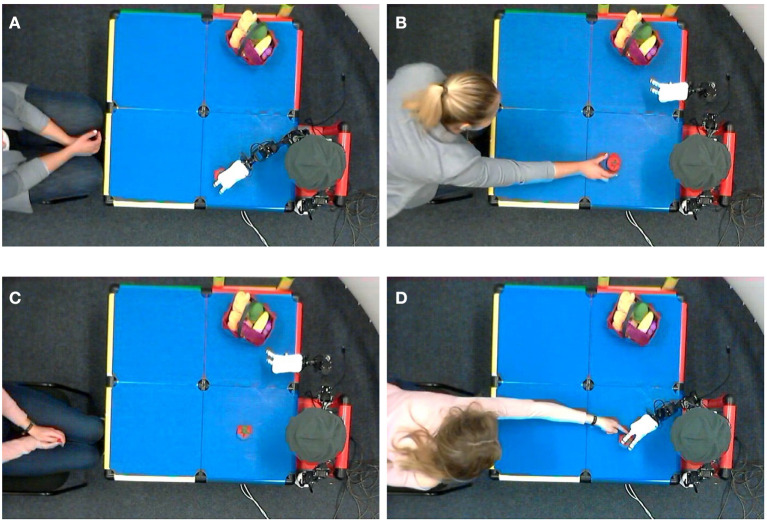
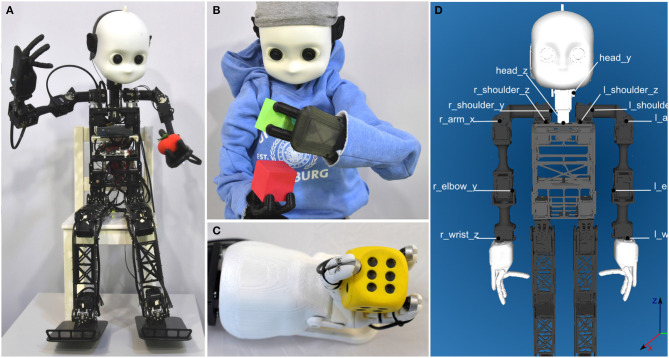
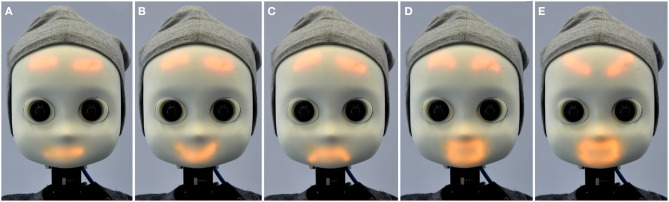
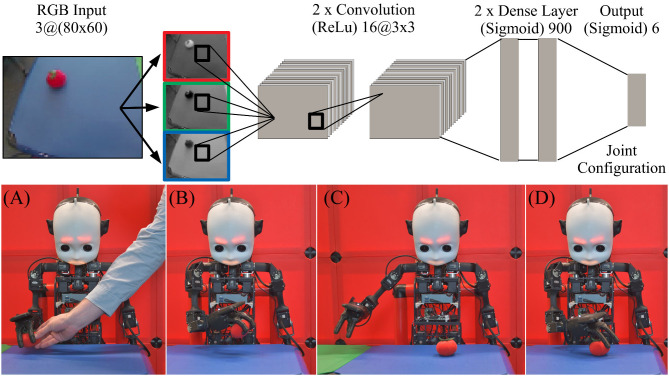
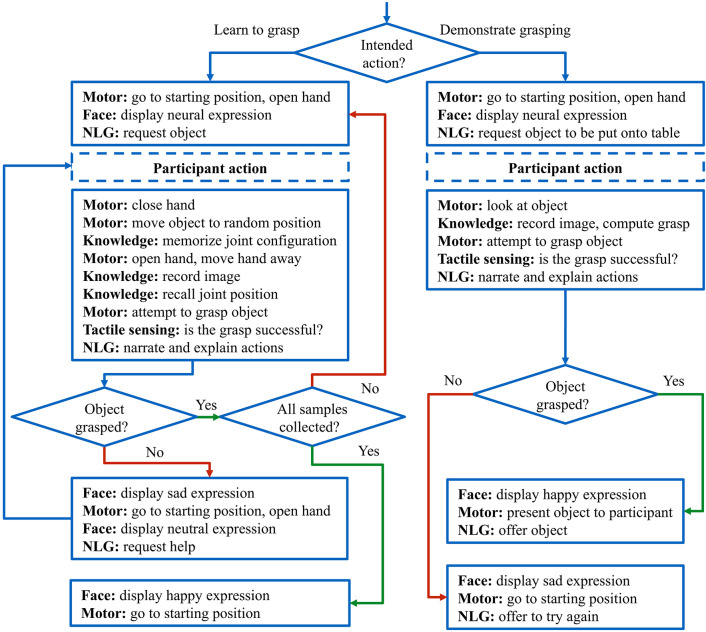
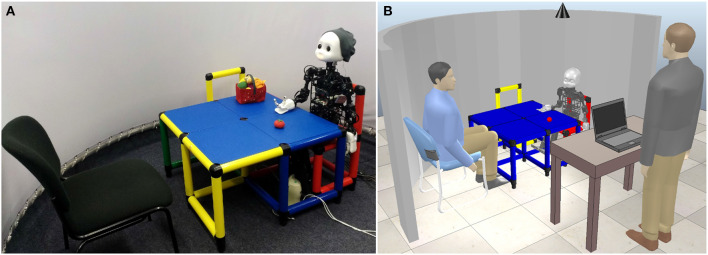
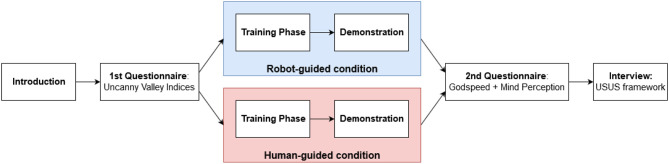
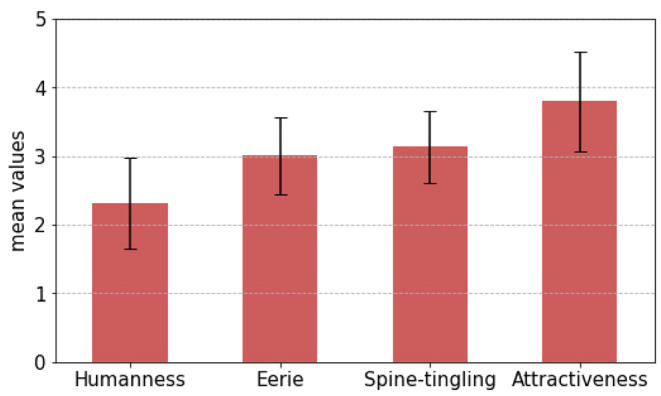
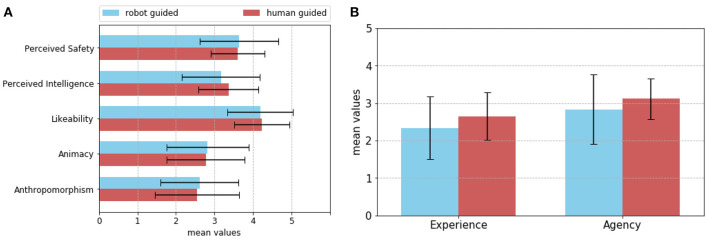
To overcome novel challenges in complex domestic environments, humanoid robots can learn from human teachers. We propose that the capability for social interaction should be a key factor in this teaching process and benefits both the subjective experience of the human user and the learning process itself. To support our hypothesis, we present a Human-Robot Interaction study on human-assisted visuomotor learning with the robot NICO, the Neuro-Inspired COmpanion, a child-sized humanoid. NICO is a flexible, social platform with sensing and manipulation abilities. We give a detailed description of NICO's design and a comprehensive overview of studies that use or evaluate NICO. To engage in social interaction, NICO can express stylized facial expressions and utter speech via an Embodied Dialogue System. NICO is characterized in particular by combining these social interaction capabilities with the abilities for human-like object manipulation and crossmodal perception. In the presented study, NICO acquires visuomotor grasping skills by interacting with its environment. In contrast to methods like motor babbling, the learning process is, in part, supported by a human teacher. To begin the learning process, an object is placed into NICO's hand, and if this object is accidentally dropped, the human assistant has to recover it. The study is conducted with 24 participants with little or no prior experience with robots. In the experimental condition, assistance is actively requested by NICO via the Embodied Dialogue System. In the condition, instructions are given by a human experimenter, while NICO remains silent. Evaluation using established questionnaires like Godspeed, Mind Perception, and Uncanny Valley Indices, along with a structured interview and video analysis of the interaction, show that the robot's active requests for assistance foster the participant's engagement and benefit the learning process. This result supports the hypothesis that the ability for social interaction is a key factor for companion robots that learn with the help of non-expert teachers, as these robots become capable of communicating active requests or questions that are vital to their learning process. We also show how the design of NICO both enables and is driven by this approach.
为了应对复杂家庭环境中的新挑战,人形机器人可以向人类教师学习。我们提出,社交互动能力应是这一教学过程中的关键因素,它对人类用户的主观体验和学习过程本身都有益处。为了支持我们的假设,我们展示了一项关于机器人NICO(即神经启发式伙伴,一个儿童尺寸的人形机器人)在人类辅助下进行视觉运动学习的人机交互研究。NICO是一个具备传感和操作能力的灵活社交平台。我们详细描述了NICO的设计,并全面概述了使用或评估NICO的研究。为了进行社交互动,NICO可以通过一个具身对话系统表达程式化的面部表情并发出语音。NICO的特别之处在于将这些社交互动能力与类人物体操作和跨模态感知能力相结合。在本研究中,NICO通过与环境交互来获取视觉运动抓握技能。与诸如运动咿呀学语等方法不同,学习过程部分得到了人类教师的支持。学习过程开始时,一个物体被放入NICO手中,如果该物体意外掉落,人类助手必须将其找回。该研究针对24名此前很少或没有机器人相关经验的参与者展开。在实验条件下,NICO通过具身对话系统主动请求协助。在另一条件下,由人类实验者给出指令而NICO保持沉默。使用诸如“神速”、“心智感知”和“恐怖谷指数”等既定问卷进行评估,同时结合结构化访谈以及对交互过程的视频分析,结果表明机器人主动请求协助促进了参与者的参与度,并有益于学习过程。这一结果支持了以下假设:社交互动能力是在非专业教师帮助下学习的陪伴机器人的关键因素,因为这些机器人能够传达对其学习过程至关重要的主动请求或问题。我们还展示了NICO的设计如何促成并受这种方法驱动。