Mick Sébastien, Lapeyre Mattieu, Rouanet Pierre, Halgand Christophe, Benois-Pineau Jenny, Paclet Florent, Cattaert Daniel, Oudeyer Pierre-Yves, de Rugy Aymar
Institut de Neurosciences Cognitives et Intégratives d'Aquitaine, UMR 5287 CNRS & Univ. Bordeaux, Bordeaux, France.
Pollen Robotics, Bordeaux, France.
Front Neurorobot. 2019 Aug 14;13:65. doi: 10.3389/fnbot.2019.00065. eCollection 2019.
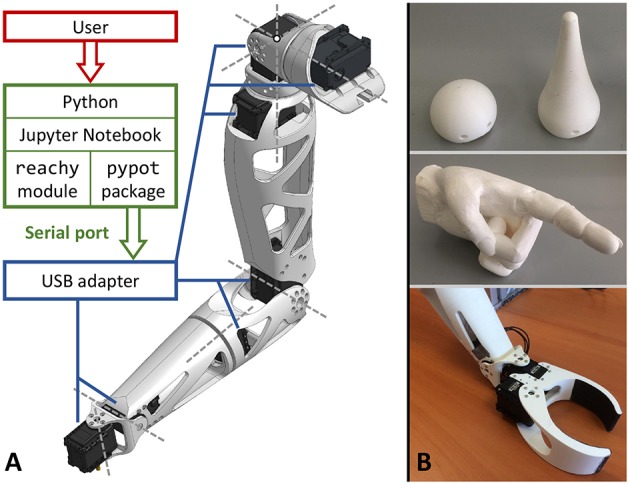
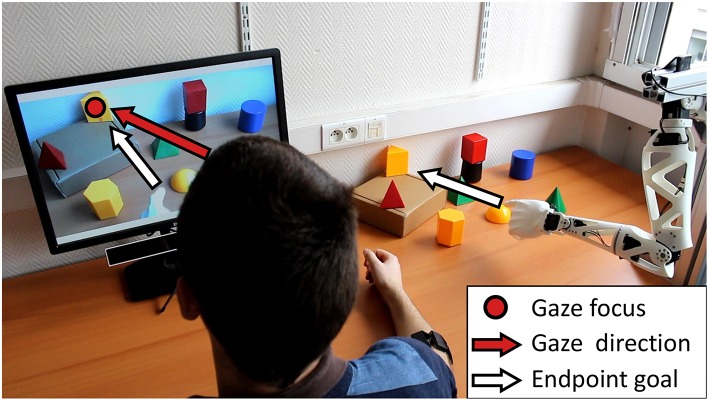
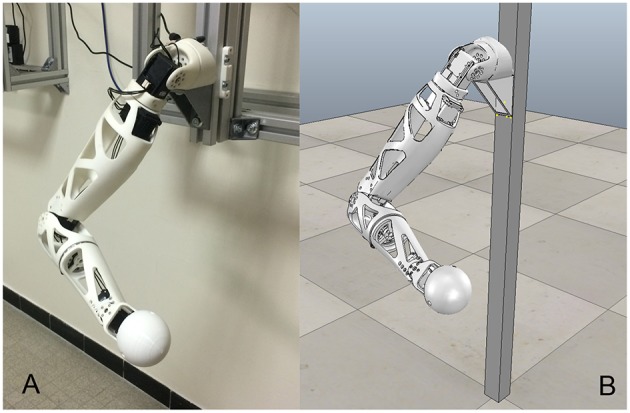
To this day, despite the increasing motor capability of robotic devices, elaborating efficient control strategies is still a key challenge in the field of humanoid robotic arms. In particular, providing a human "pilot" with efficient ways to drive such a robotic arm requires thorough testing prior to integration into a finished system. Additionally, when it is needed to preserve anatomical consistency between pilot and robot, such testing requires to employ devices showing human-like features. To fulfill this need for a biomimetic test platform, we present Reachy, a human-like life-scale robotic arm with seven joints from shoulder to wrist. Although Reachy does not include a poly-articulated hand and is therefore more suitable for studying reaching than manipulation, a robotic hand prototype from available third-party projects could be integrated to it. Its 3D-printed structure and off-the-shelf actuators make it inexpensive relatively to the price of an industrial-grade robot. Using an open-source architecture, its design makes it broadly connectable and customizable, so it can be integrated into many applications. To illustrate how Reachy can connect to external devices, this paper presents several proofs of concept where it is operated with various control strategies, such as tele-operation or gaze-driven control. In this way, Reachy can help researchers to explore, develop and test innovative control strategies and interfaces on a human-like robot.
时至今日,尽管机器人设备的运动能力不断提高,但制定高效的控制策略仍是类人机器人手臂领域的一项关键挑战。特别是,为人类“驾驶员”提供驱动此类机器人手臂的有效方法,需要在集成到成品系统之前进行全面测试。此外,当需要保持驾驶员与机器人之间的解剖学一致性时,此类测试需要使用具有类人特征的设备。为满足对仿生测试平台的这一需求,我们推出了Reachy,这是一款从肩部到手腕有七个关节的类人真实比例机器人手臂。虽然Reachy不包括多关节手,因此更适合研究伸手动作而非操作,但可以将现有第三方项目的机器人手原型集成到它上面。其3D打印结构和现成的执行器使其相对于工业级机器人的价格较为便宜。采用开源架构,其设计使其具有广泛的可连接性和可定制性,因此可以集成到许多应用中。为说明Reachy如何连接到外部设备,本文展示了几个概念验证,其中它采用了各种控制策略进行操作,如远程操作或凝视驱动控制。通过这种方式,Reachy可以帮助研究人员在类人机器人上探索、开发和测试创新的控制策略及接口。