Alanis-Espinosa Myriam, Gutiérrez David
Laboratory of Biomedical Signal Processing, Center for Research and Advanced Studies (Cinvestav) at Monterrey, Apodaca, Mexico.
Front Psychol. 2020 Jul 2;11:1301. doi: 10.3389/fpsyg.2020.01301. eCollection 2020.
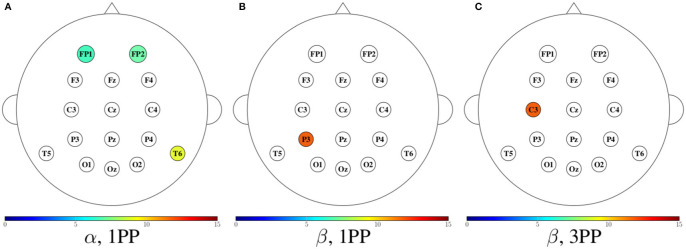
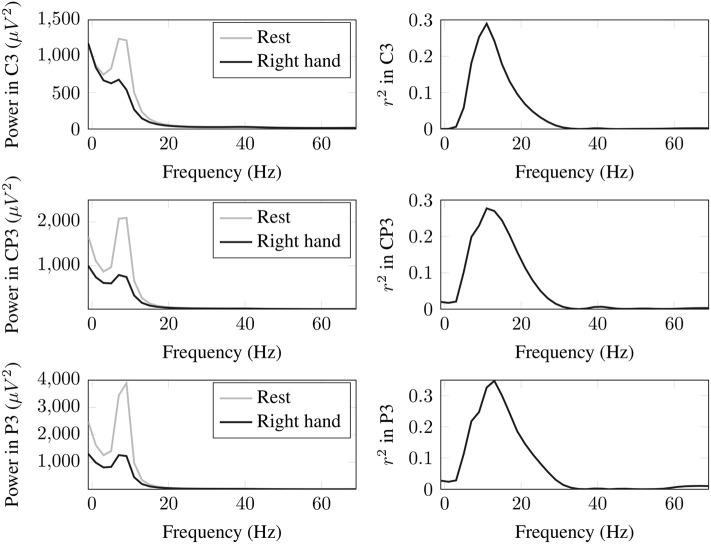
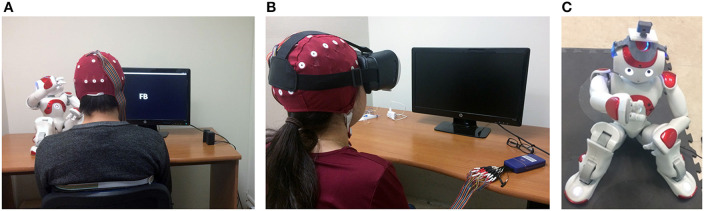
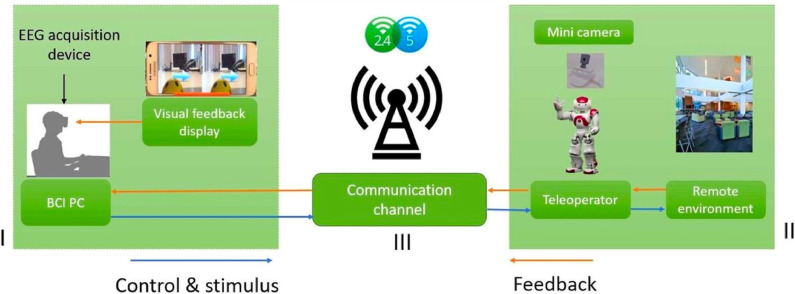
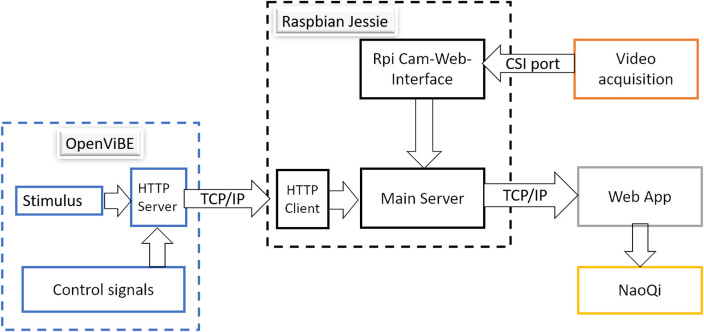
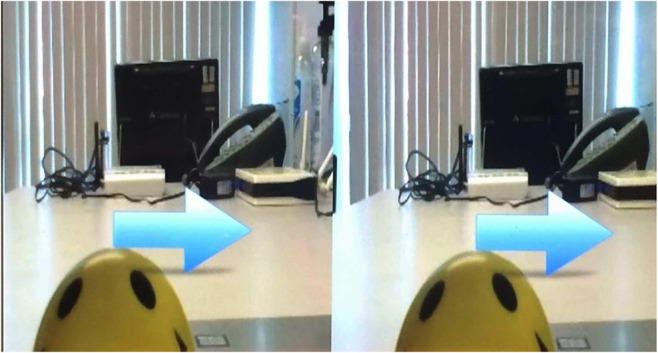
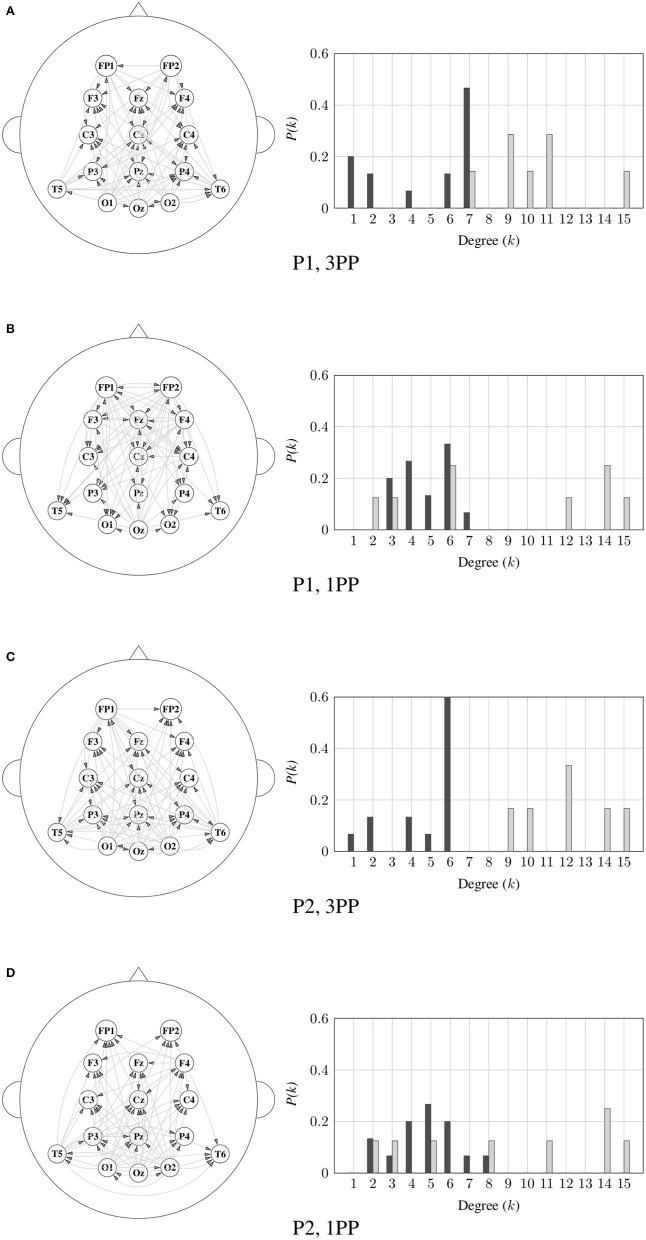
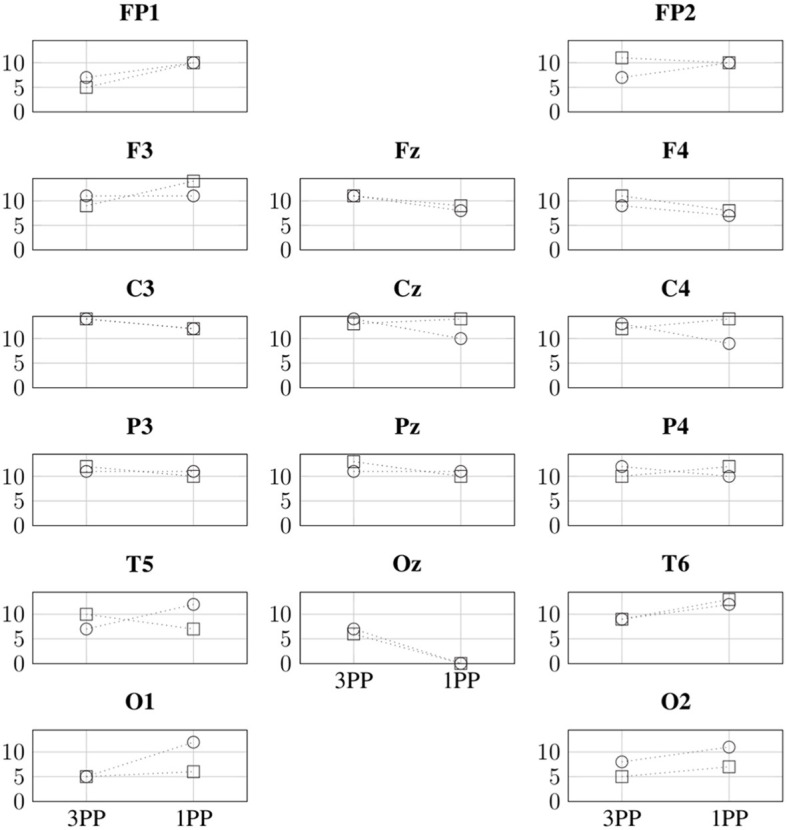
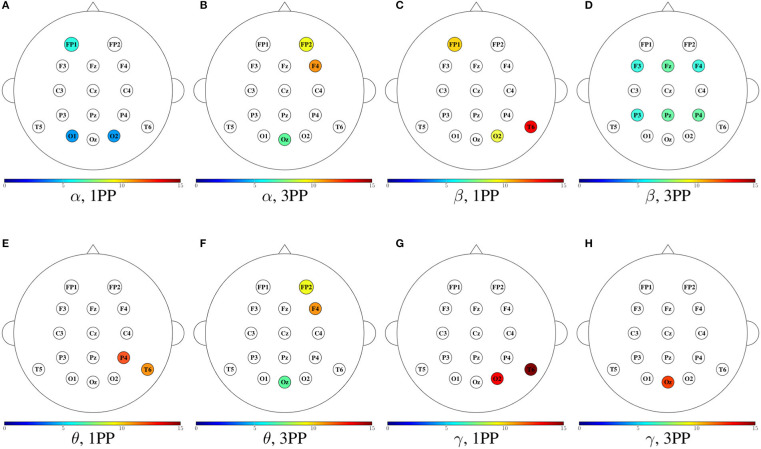
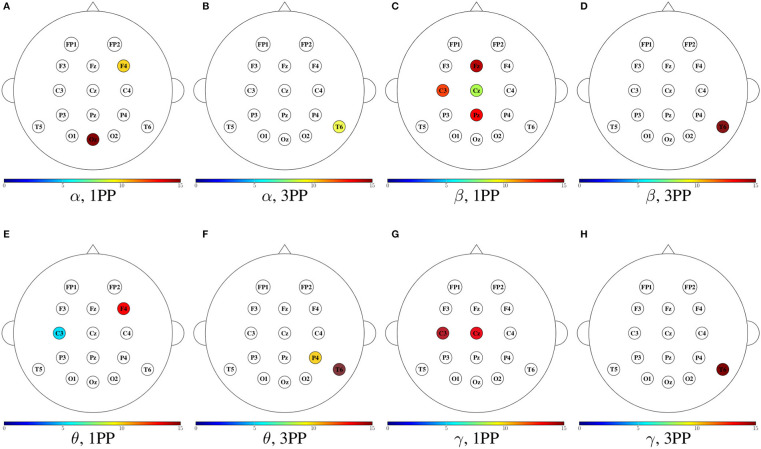
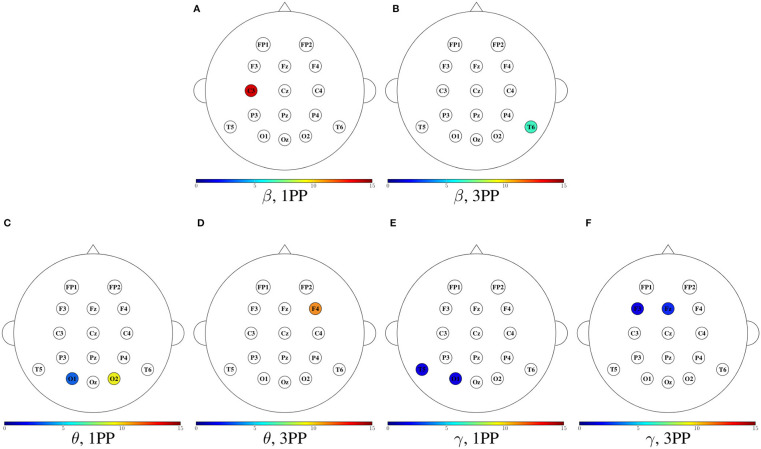
New trends on brain-computer interface (BCI) design are aiming to combine this technology with immersive virtual reality in order to provide a sense of realism to its users. In this study, we propose an experimental BCI to control an immersive telepresence system using motor imagery (MI). The system is immersive in the sense that the users can control the movement of a NAO humanoid robot in a first person perspective (1PP), i.e., as if the movement of the robot was his/her own. We analyze functional brain connectivity between 1PP and 3PP during the control of our BCI using graph theory properties such as degree, betweenness centrality, and efficiency. Changes in these metrics are obtained for the case of the 1PP, as well as for the traditional third person perspective (3PP) in which the user can see the movement of the robot as feedback. As proof-of-concept, electroencephalography (EEG) signals were recorded from two subjects while they performed MI to control the movement of the robot. The graph theoretical analysis was applied to the binary directed networks obtained through the partial directed coherence (PDC). In our preliminary assessment we found that the efficiency in the α brain rhythm is greater in 1PP condition in comparison to the 3PP at the prefrontal cortex. Also, a stronger influence of signals measured at EEG channel C3 (primary motor cortex) to other regions was found in 1PP condition. Furthermore, our preliminary results seem to indicate that α and β brain rhythms have a high indegree at prefrontal cortex in 1PP condition, and this could be possibly related to the experience of sense of agency. Therefore, using the PDC combined with graph theory while controlling a telepresence robot in an immersive system may contribute to understand the organization and behavior of brain networks in these environments.
脑机接口(BCI)设计的新趋势旨在将该技术与沉浸式虚拟现实相结合,以便为用户提供真实感。在本研究中,我们提出了一种实验性BCI,用于使用运动想象(MI)来控制沉浸式远程呈现系统。该系统具有沉浸感,即用户可以从第一人称视角(1PP)控制NAO人形机器人的运动,也就是说,仿佛机器人的运动就是他/她自己的运动。我们使用诸如度、介数中心性和效率等图论属性,分析在控制我们的BCI期间1PP和第三人称视角(3PP)之间的功能脑连接。针对1PP的情况以及传统的第三人称视角(3PP,用户可以将机器人的运动作为反馈看到),获取这些指标的变化。作为概念验证,在两名受试者执行MI以控制机器人运动时记录了脑电图(EEG)信号。将图论分析应用于通过偏定向相干(PDC)获得的二元有向网络。在我们的初步评估中,我们发现与3PP相比,在1PP条件下前额叶皮层的α脑节律效率更高。此外,在1PP条件下发现脑电图通道C3(初级运动皮层)测量的信号对其他区域有更强的影响。此外,我们的初步结果似乎表明,在1PP条件下,α和β脑节律在前额叶皮层具有较高的入度,这可能与能动感的体验有关。因此,在沉浸式系统中控制远程呈现机器人时,将PDC与图论相结合可能有助于理解这些环境中脑网络的组织和行为。