Li Wei, Cao Hu, Liao Jiacai, Xia Jiahao, Cao Libo, Knoll Alois
State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body, Hunan University, Changsha, China.
Chair of Robotics, Artificial Intelligence and Real-time Systems, Technische Universität München, Munich, Germany.
Front Neurorobot. 2020 Jul 24;14:46. doi: 10.3389/fnbot.2020.00046. eCollection 2020.
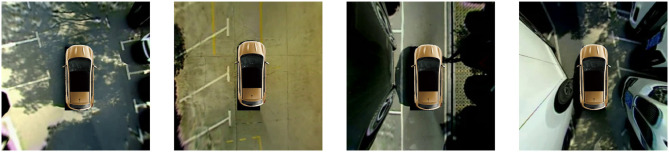
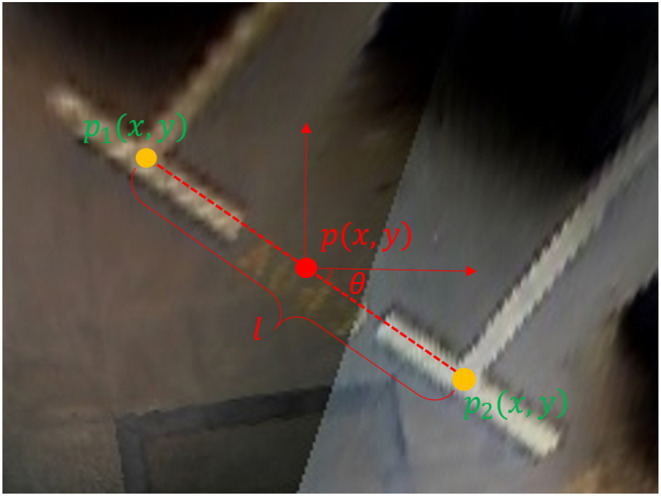
Due to the complex visual environment and incomplete display of parking slots on around-view images, vision-based parking slot detection is a major challenge. Previous studies in this field mostly use the existing models to solve the problem, the steps of which are cumbersome. In this paper, we propose a parking slot detection method that uses directional entrance line regression and classification based on a deep convolutional neural network (DCNN) to make it robust and simple. For parking slots with different shapes and observed from different angles, we represent the parking slot as a directional entrance line. Subsequently, we design a DCNN detector to simultaneously obtain the type, position, length, and direction of the entrance line. After that, the complete parking slot can be easily inferred using the detection results and prior geometric information. To verify our method, we conduct experiments on the public ps2.0 dataset and self-annotated parking slot dataset with 2,135 images. The results show that our method not only outperforms state-of-the-art competitors with a precision rate of 99.68% and a recall rate of 99.41% on the ps2.0 dataset but also performs a satisfying generalization on the self-annotated dataset. Moreover, it achieves a real-time detection speed of 13 ms per frame on Titan Xp. By converting the parking slot into a directional entrance line, the specially designed DCNN detector can quickly and effectively detect various types of parking slots.
由于环视图像中视觉环境复杂且停车位显示不完整,基于视觉的停车位检测是一项重大挑战。该领域以往的研究大多使用现有模型来解决问题,其步骤繁琐。在本文中,我们提出了一种停车位检测方法,该方法基于深度卷积神经网络(DCNN)使用方向入口线回归和分类,使其既稳健又简单。对于不同形状且从不同角度观察的停车位,我们将停车位表示为方向入口线。随后,我们设计了一个DCNN检测器,以同时获取入口线的类型、位置、长度和方向。在此之后,利用检测结果和先验几何信息可以轻松推断出完整的停车位。为了验证我们的方法,我们在包含2135张图像的公开ps2.0数据集和自标注停车位数据集上进行了实验。结果表明,我们的方法不仅在ps2.0数据集上以99.68%的精确率和99.41%的召回率优于现有最佳竞争对手,而且在自标注数据集上也具有令人满意的泛化能力。此外,它在Titan Xp上实现了每帧13毫秒的实时检测速度。通过将停车位转换为方向入口线,专门设计的DCNN检测器可以快速有效地检测各种类型的停车位。