Virtual Environments Lab, Graduate School of Advanced Imaging Science, Multimedia and Film, Chung-Ang University, Seoul 06974, Korea.
Sensors (Basel). 2020 Sep 18;20(18):5342. doi: 10.3390/s20185342.
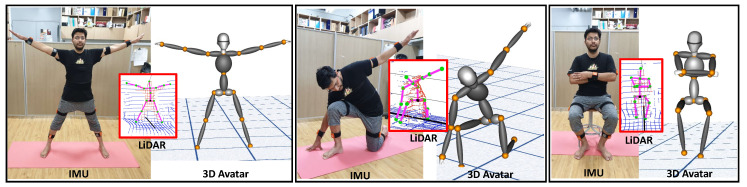
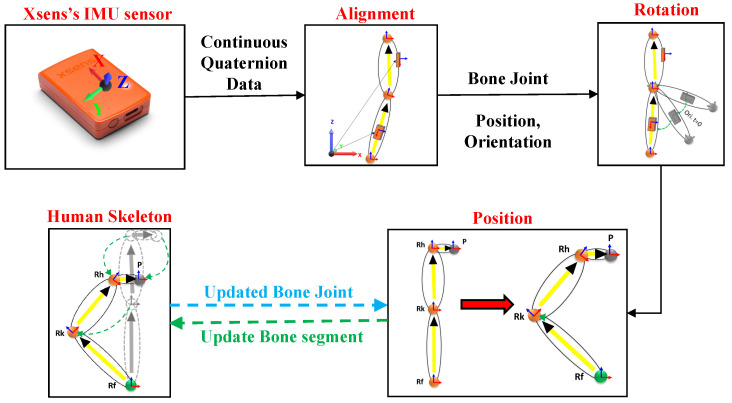
Today, enhancement in sensing technology enables the use of multiple sensors to track human motion/activity precisely. Tracking human motion has various applications, such as fitness training, healthcare, rehabilitation, human-computer interaction, virtual reality, and activity recognition. Therefore, the fusion of multiple sensors creates new opportunities to develop and improve an existing system. This paper proposes a pose-tracking system by fusing multiple three-dimensional (3D) light detection and ranging (lidar) and inertial measurement unit (IMU) sensors. The initial step estimates the human skeletal parameters proportional to the target user's height by extracting the point cloud from lidars. Next, IMUs are used to capture the orientation of each skeleton segment and estimate the respective joint positions. In the final stage, the displacement drift in the position is corrected by fusing the data from both sensors in real time. The installation setup is relatively effortless, flexible for sensor locations, and delivers results comparable to the state-of-the-art pose-tracking system. We evaluated the proposed system regarding its accuracy in the user's height estimation, full-body joint position estimation, and reconstruction of the 3D avatar. We used a publicly available dataset for the experimental evaluation wherever possible. The results reveal that the accuracy of height and the position estimation is well within an acceptable range of ±3-5 cm. The reconstruction of the motion based on the publicly available dataset and our data is precise and realistic.
如今,传感技术的提升使得我们可以使用多个传感器来精确地跟踪人类的运动/活动。跟踪人类运动有多种应用,例如健身训练、医疗保健、康复、人机交互、虚拟现实和活动识别。因此,多个传感器的融合为开发和改进现有系统创造了新的机会。本文提出了一种通过融合多个三维(3D)激光雷达(lidar)和惯性测量单元(IMU)传感器的姿态跟踪系统。该系统的初始步骤通过从 lidar 中提取点云来估计与目标用户身高成比例的人体骨骼参数。接下来,使用 IMU 来捕获每个骨骼段的方向,并估计相应的关节位置。在最后阶段,通过实时融合来自两个传感器的数据来校正位置的位移漂移。安装设置相对简单,传感器位置灵活,并提供与最先进的姿态跟踪系统相当的结果。我们评估了该系统在用户身高估计、全身关节位置估计和 3D 头像重建方面的准确性。在可能的情况下,我们使用了公共可用数据集进行实验评估。结果表明,高度和位置估计的准确性在可接受的±3-5cm 范围内。基于公共数据集和我们自己的数据进行的运动重建是精确和现实的。