Department of Electrical, Electronics and Telecommunication Engineering, Politecnico di Torino, 10129 Torino TO, Italy.
Department of Physical Medicine and Rehabilitation, Harvard Medical School, Boston, MA 02129, USA.
Sensors (Basel). 2020 Sep 18;20(18):5361. doi: 10.3390/s20185361.
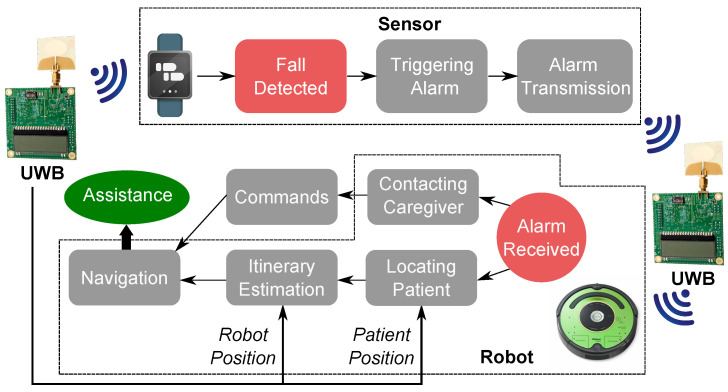
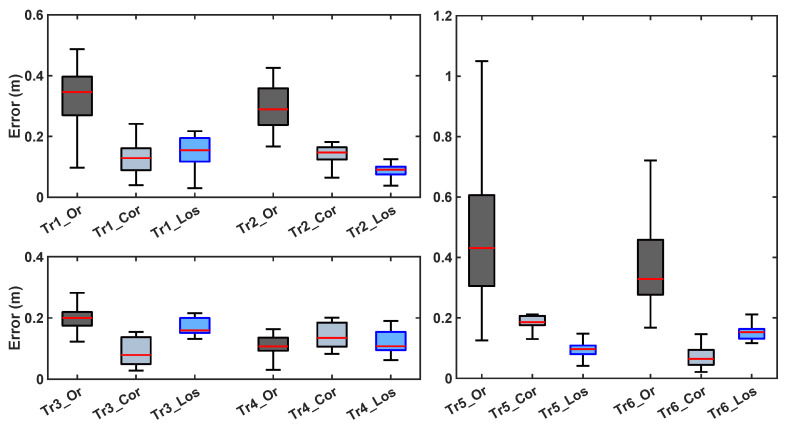
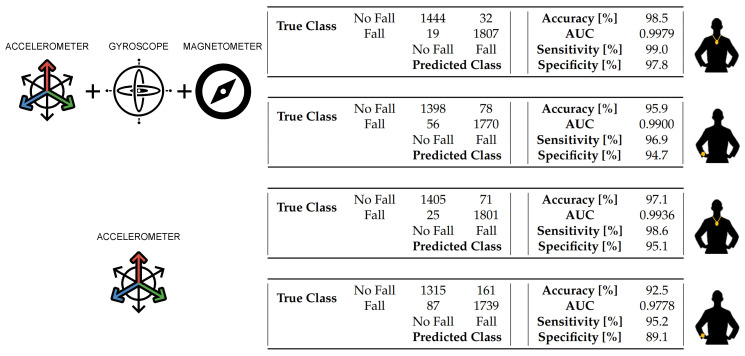
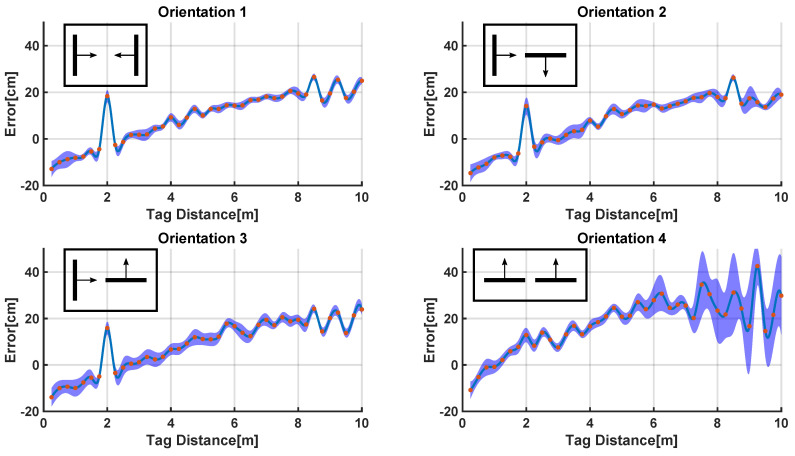
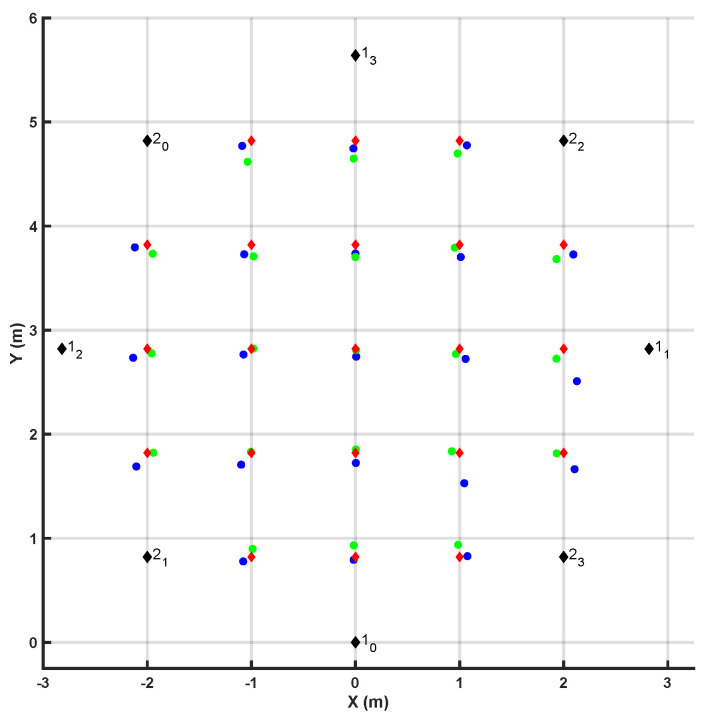
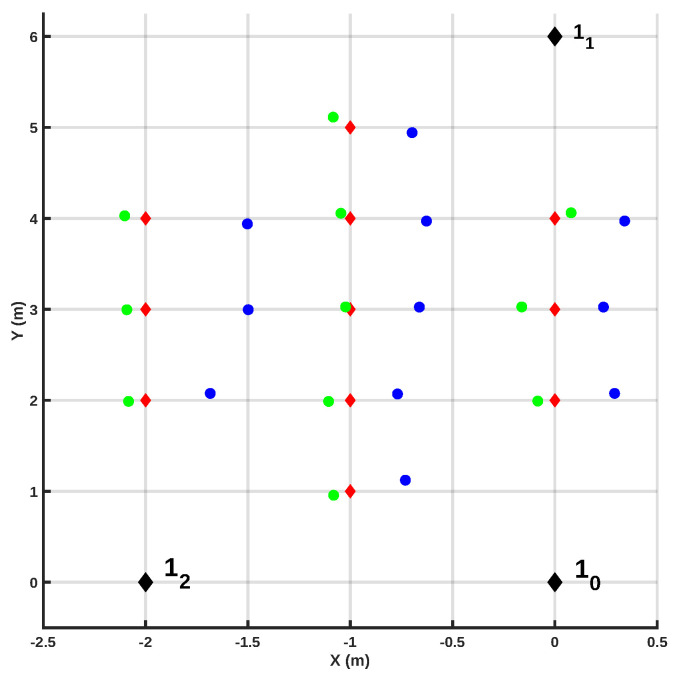
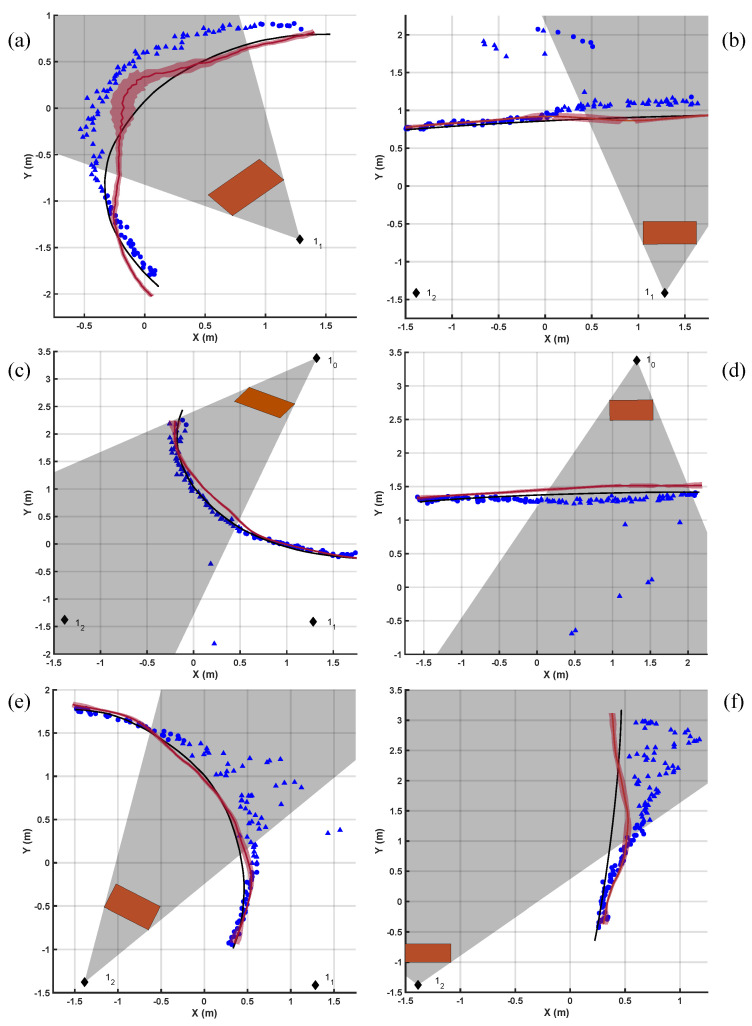
Falls in the home environment are a primary cause of injury in older adults. According to the U.S. Centers for Disease Control and Prevention, every year, one in four adults 65 years of age and older reports experiencing a fall. A variety of different technologies have been proposed to detect fall events. However, the need to detect all fall instances (i.e., to avoid false negatives) has led to the development of systems marked by high sensitivity and hence a significant number of false alarms. The occurrence of false alarms causes frequent and unnecessary calls to emergency response centers, which are critical resources that should be utilized only when necessary. Besides, false alarms decrease the level of confidence of end-users in the fall detection system with a negative impact on their compliance with using the system (e.g., wearing the sensor enabling the detection of fall events). Herein, we present a novel approach aimed to augment traditional fall detection systems that rely on wearable sensors and fall detection algorithms. The proposed approach utilizes a UWB-based tracking system and a home robot. When the fall detection system generates an alarm, the alarm is relayed to a base station that utilizes a UWB-based tracking system to identify where the older adult and the robot are so as to enable navigating the environment using the robot and reaching the older adult to check if he/she experienced a fall. This approach prevents unnecessary calls to emergency response centers while enabling a tele-presence using the robot when appropriate. In this paper, we report the results of a novel fall detection algorithm, the characteristics of the alarm notification system, and the accuracy of the UWB-based tracking system that we implemented. The fall detection algorithm displayed a sensitivity of 99.0% and a specificity of 97.8%. The alarm notification system relayed all simulated alarm notification instances with a maximum delay of 106 ms. The UWB-based tracking system was found to be suitable to locate radio tags both in line-of-sight and in no-line-of-sight conditions. This result was obtained by using a machine learning-based algorithm that we developed to detect and compensate for the multipath effect in no-line-of-sight conditions. When using this algorithm, the error affecting the estimated position of the radio tags was smaller than 0.2 m, which is satisfactory for the application at hand.
家庭环境中的跌倒事件是老年人受伤的主要原因。根据美国疾病控制与预防中心的数据,每年有四分之一的 65 岁及以上的成年人报告经历过跌倒事件。已经提出了各种不同的技术来检测跌倒事件。然而,为了检测到所有的跌倒事件(即避免漏报),导致了开发出具有高灵敏度的系统,从而产生了大量的误报。误报会导致频繁且不必要地向紧急响应中心发出呼叫,而这些中心是宝贵的资源,应仅在必要时使用。此外,误报会降低最终用户对跌倒检测系统的信任度,从而对他们遵守使用系统的意愿产生负面影响(例如,佩戴传感器以检测跌倒事件)。在这里,我们提出了一种新的方法,旨在增强依赖于可穿戴传感器和跌倒检测算法的传统跌倒检测系统。所提出的方法利用了超宽带(UWB)跟踪系统和家庭机器人。当跌倒检测系统发出警报时,警报会被转发到基站,基站利用 UWB 跟踪系统来识别老年人和机器人的位置,以便使用机器人导航环境并到达老年人身边,检查他/她是否经历过跌倒。这种方法可以防止不必要地呼叫紧急响应中心,同时在适当的时候使用机器人实现远程存在。在本文中,我们报告了一种新的跌倒检测算法的结果、警报通知系统的特点以及我们实现的 UWB 跟踪系统的准确性。跌倒检测算法的灵敏度为 99.0%,特异性为 97.8%。警报通知系统以最大延迟 106ms 的速度转发了所有模拟的警报通知实例。UWB 跟踪系统被发现适合在视距和非视距条件下定位无线电标签。这一结果是通过使用我们开发的基于机器学习的算法来检测和补偿非视距条件下的多径效应而获得的。使用该算法时,影响无线电标签估计位置的误差小于 0.2m,这对于当前应用是令人满意的。