Center for Research on Leading Technology of Special Equipment, School of Mechanical and Electrical Engineering, Guangzhou University, Guangzhou, 510006, China.
School of Mechanical and Electrical Engineering, Guangzhou University, Guangzhou, 510006, China.
Sci Rep. 2020 Nov 2;10(1):18778. doi: 10.1038/s41598-020-75346-5.
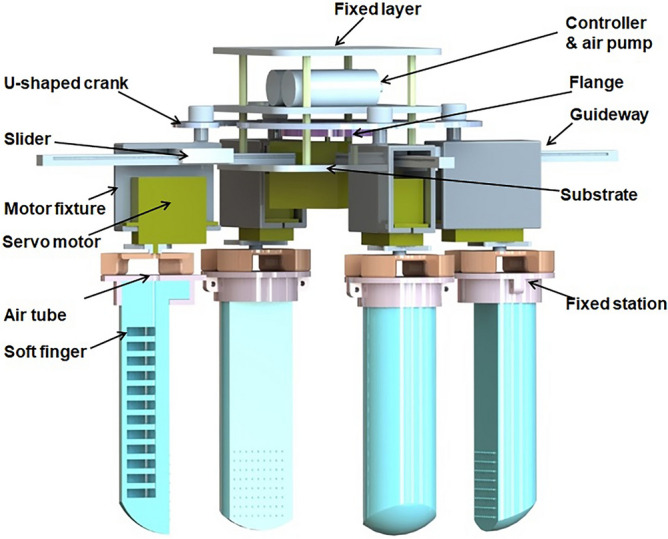
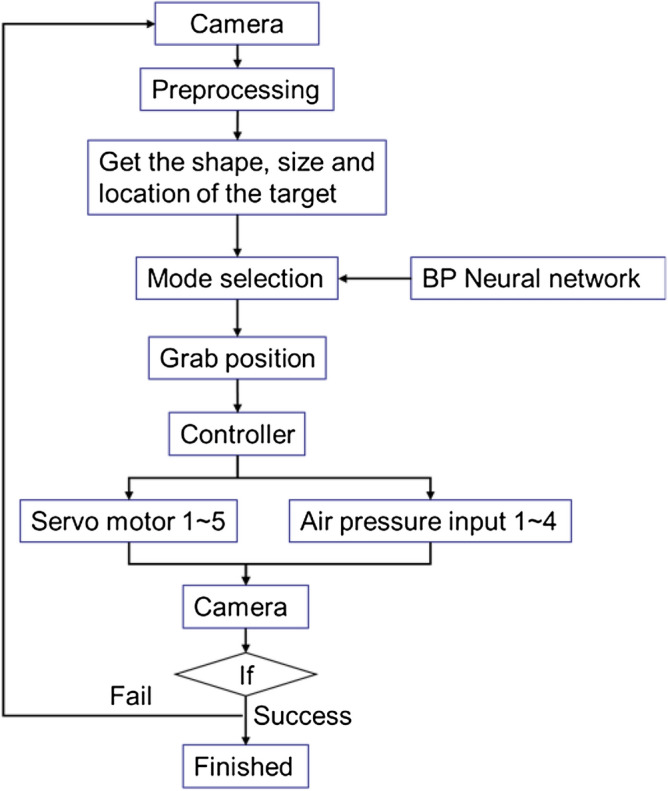
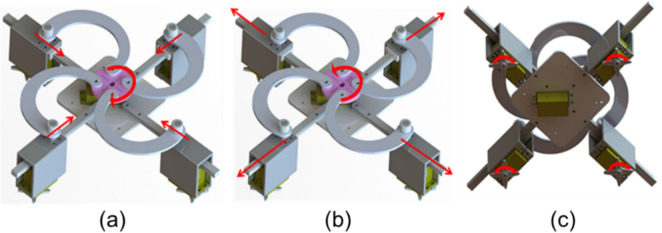
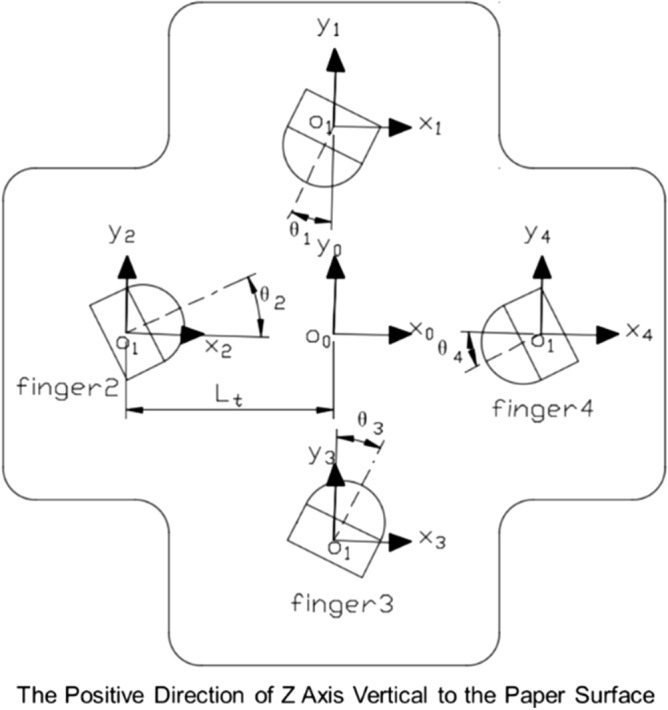
In this paper, a variable structure pneumatic soft robot is proposed. Its structure is variable in that when it grasps irregular objects, it can adapt to different sizes by active expansion or contraction. Its expansion range is from diameter 200 to 300 mm, its four soft pneumatic actuators (SPAs) can be rotated independently to adapt to different shapes, and it has high flexibility. The active compliant grasping method enables it to capture at the best position, which can improve the success rate of capture and reduce damage to the object being grasped. The experiment proves the effectiveness of the variable structure mechanism, and the proposed soft robot has low cost and a simple manufacturing process, so the mechanism has great application prospects.
本文提出了一种变结构气动软体机器人。它的结构是可变的,当它抓取不规则物体时,它可以通过主动膨胀或收缩来适应不同的大小。它的膨胀范围从直径 200 到 300 毫米,它的四个软气动执行器(SPAs)可以独立旋转以适应不同的形状,并且具有很高的灵活性。主动柔顺抓取方法使它能够在最佳位置进行抓取,这可以提高抓取的成功率并减少对被抓取物体的损坏。实验证明了变结构机构的有效性,所提出的软体机器人具有低成本和简单的制造工艺,因此该机构具有广阔的应用前景。