Alves Samuel, Babcinschi Mihail, Silva Afonso, Neto Diogo, Fonseca Diogo, Neto Pedro
University of Coimbra, CEMMPRE, ARISE, Department of Mechanical Engineering, 3030-788 Coimbra, Portugal.
Cyborg Bionic Syst. 2023 Aug 8;4:0051. doi: 10.34133/cbsystems.0051. eCollection 2023.
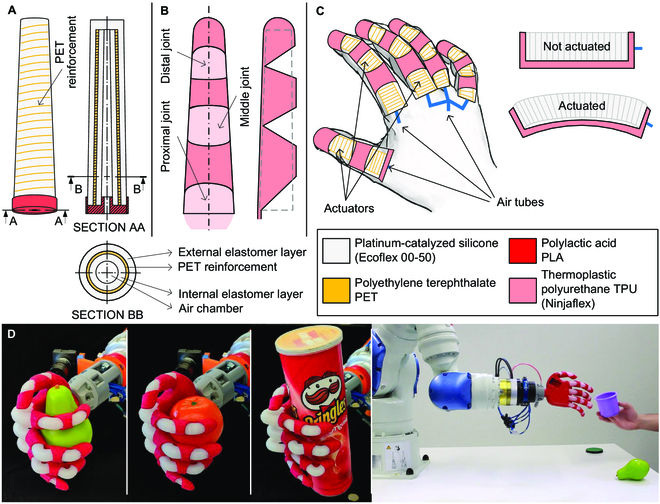
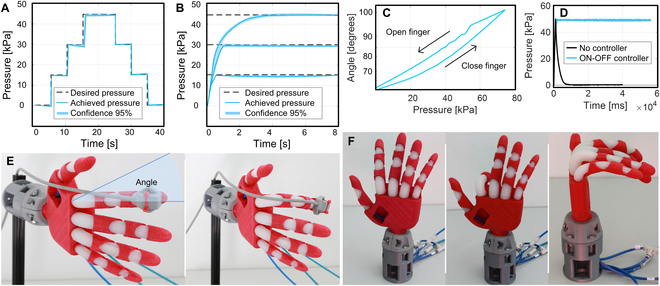
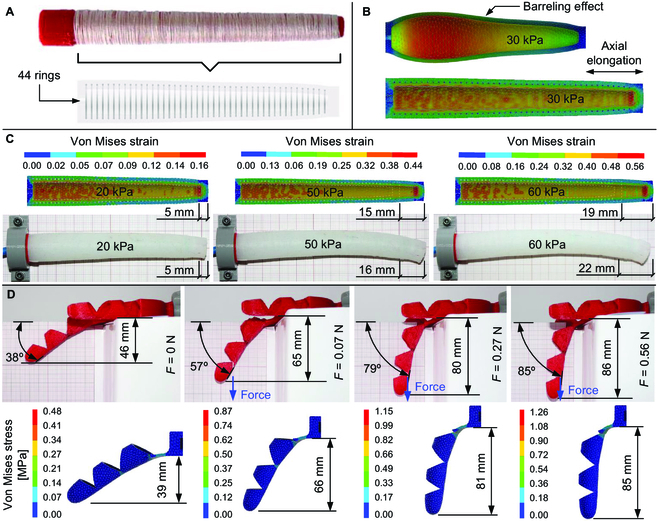
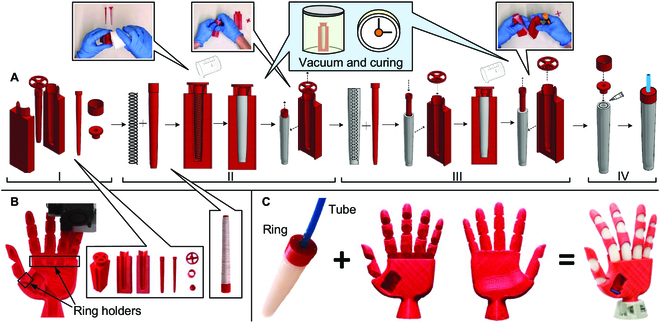
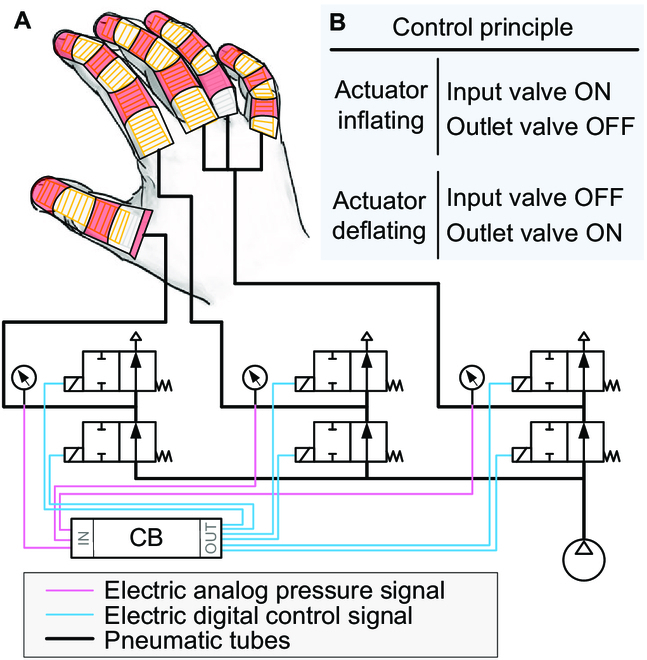
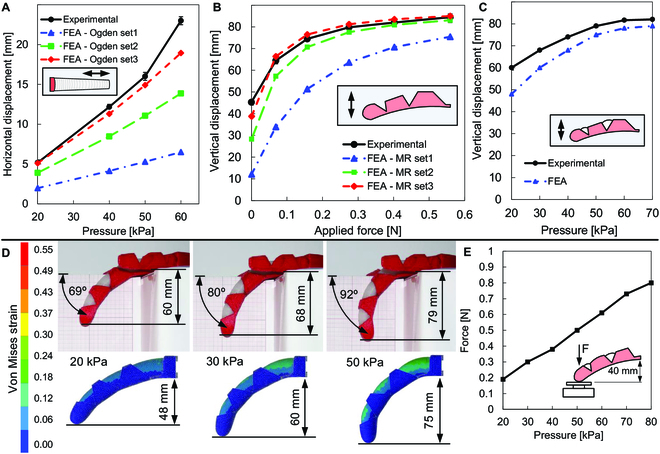
Machines that mimic humans have inspired scientists for centuries. Bioinspired soft robotic hands are a good example of such an endeavor, featuring intrinsic material compliance and continuous motion to deal with uncertainty and adapt to unstructured environments. Recent research led to impactful achievements in functional designs, modeling, fabrication, and control of soft robots. Nevertheless, the full realization of life-like movements is still challenging to achieve, often based on trial-and-error considerations from design to fabrication, consuming time and resources. In this study, a soft robotic hand is proposed, composed of soft actuator cores and an exoskeleton, featuring a multimaterial design aided by finite element analysis (FEA) to define the hand geometry and promote finger's bendability. The actuators are fabricated using molding, and the exoskeleton is 3D-printed in a single step. An ON-OFF controller keeps the set fingers' inner pressures related to specific bending angles, even in the presence of leaks. The FEA numerical results were validated by experimental tests, as well as the ability of the hand to grasp objects with different shapes, weights, and sizes. This integrated solution will make soft robotic hands more available to people, at a reduced cost, avoiding the time-consuming design-fabrication trial-and-error processes.
几个世纪以来,模仿人类的机器一直启发着科学家。受生物启发的软机器人手就是这种努力的一个很好的例子,它具有内在的材料柔顺性和连续运动,以应对不确定性并适应非结构化环境。最近的研究在软机器人的功能设计、建模、制造和控制方面取得了显著成就。然而,要完全实现逼真的运动仍然具有挑战性,通常需要从设计到制造进行反复试验,耗费时间和资源。在本研究中,提出了一种软机器人手,它由软致动器核心和外骨骼组成,采用多材料设计,并借助有限元分析(FEA)来确定手的几何形状并提高手指的可弯曲性。致动器采用模塑法制造,外骨骼通过一步3D打印而成。一个开关控制器能使设定的手指内部压力与特定弯曲角度相关联,即使存在泄漏情况也是如此。有限元分析的数值结果通过实验测试得到了验证,同时该手抓取不同形状、重量和尺寸物体的能力也得到了验证。这种集成解决方案将使软机器人手以更低的成本更易于被人们使用,避免了耗时的设计-制造反复试验过程。