Ryu Hyejeong
Department of Mechatronics Engineering, Kangwon National University, Chuncheon KR24341, Korea.
Sensors (Basel). 2020 Nov 3;20(21):6270. doi: 10.3390/s20216270.
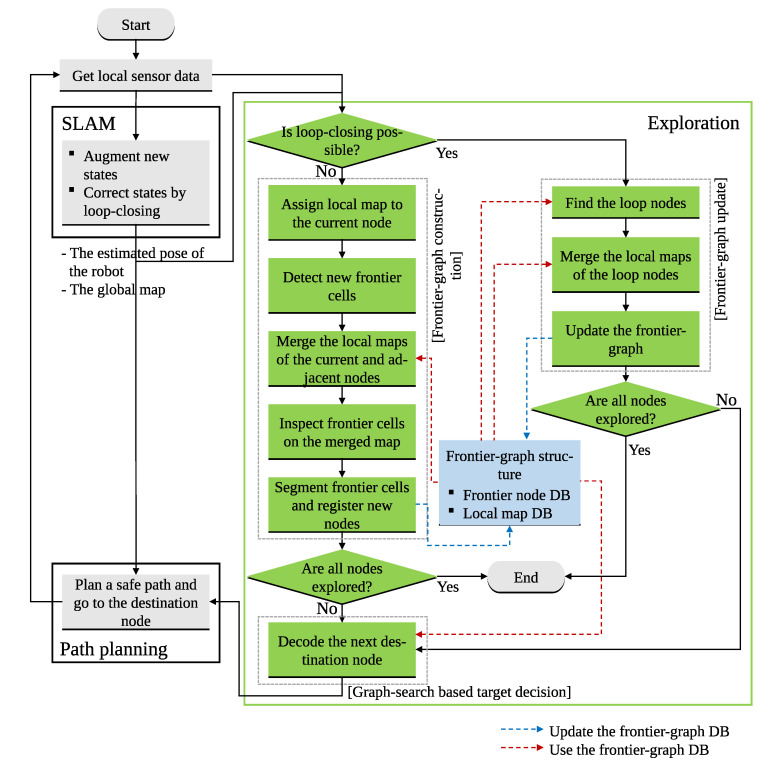
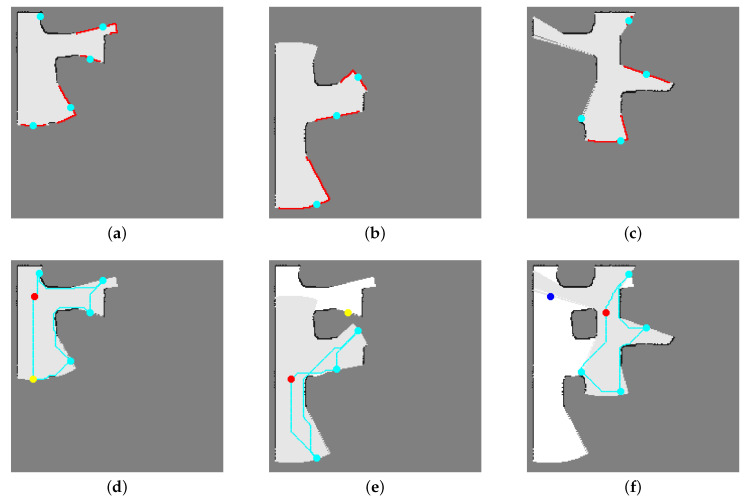
This paper describes a graph search-based exploration method. Segmented frontier nodes and their relative transformations constitute a frontier-graph structure. Frontier detection and segmentation are performed using local grid maps of adjacent nodes. The proposed frontier-graph structure can systematically manage local information according to the exploration state and overcome the problem caused by updating a single global grid map. The robot selects the next target using breadth-first search (BFS) exploration of the frontier-graph. The BFS exploration is improved to generate an efficient loop-closing sequence between adjacent nodes. We verify that our BFS-based exploration method can gradually extend the frontier-graph structure and efficiently map the entire environment, regardless of the starting position.
本文描述了一种基于图搜索的探索方法。分段前沿节点及其相对变换构成了前沿图结构。使用相邻节点的局部网格地图进行前沿检测和分割。所提出的前沿图结构可以根据探索状态系统地管理局部信息,并克服更新单个全局网格地图所带来的问题。机器人使用前沿图的广度优先搜索(BFS)探索来选择下一个目标。对BFS探索进行了改进,以在相邻节点之间生成高效的闭环序列。我们验证了基于BFS的探索方法可以逐渐扩展前沿图结构,并有效地绘制整个环境,而不管起始位置如何。