Bai Zixuan, Jiang Guang, Xu Ailing
School of Telecommunications Engineering, Xidian University, Xi'an 710071, China.
Sensors (Basel). 2020 Nov 5;20(21):6319. doi: 10.3390/s20216319.
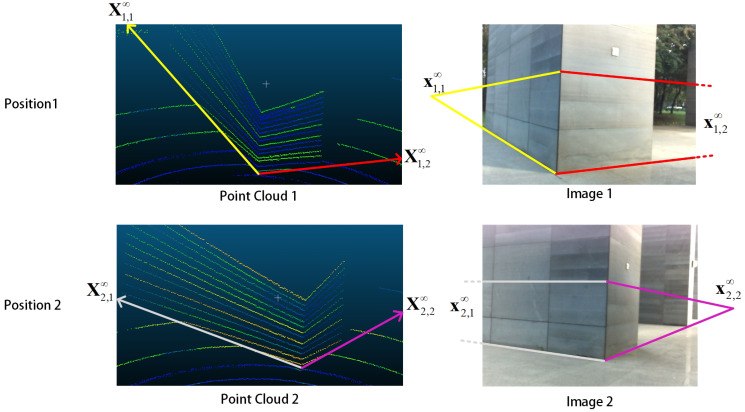
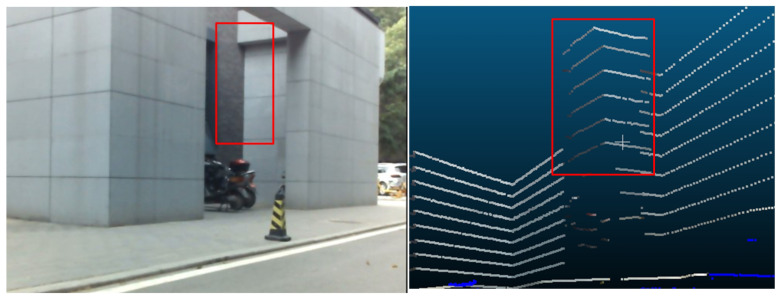
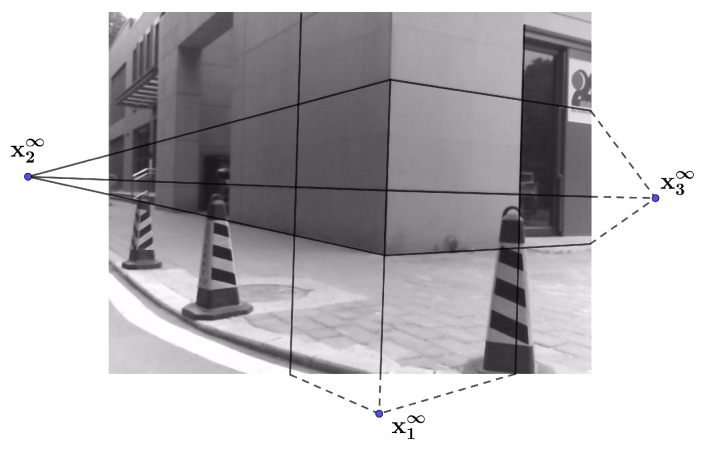
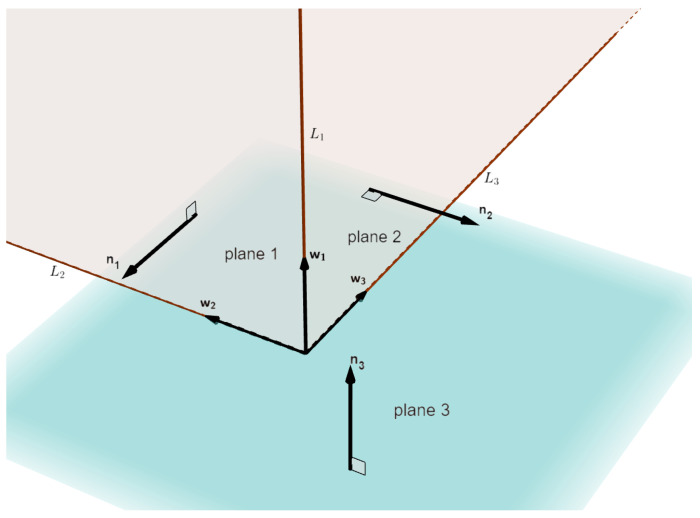
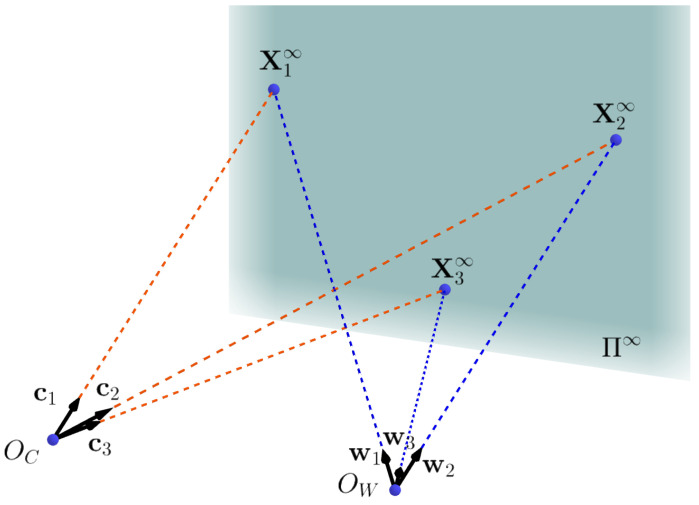
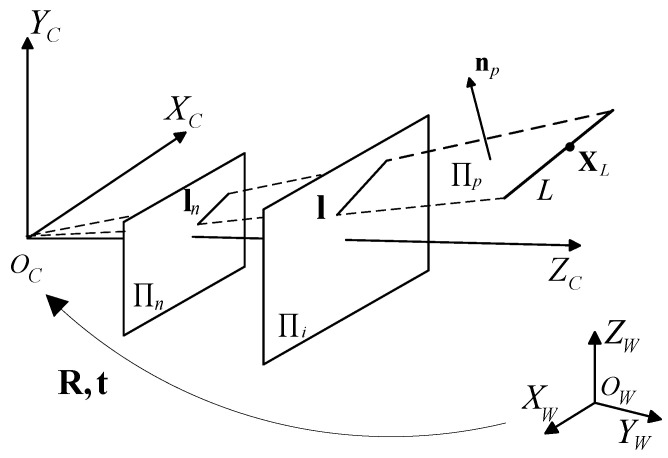
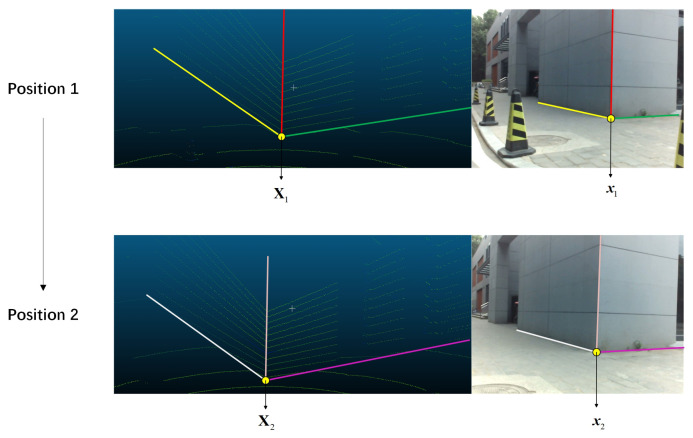
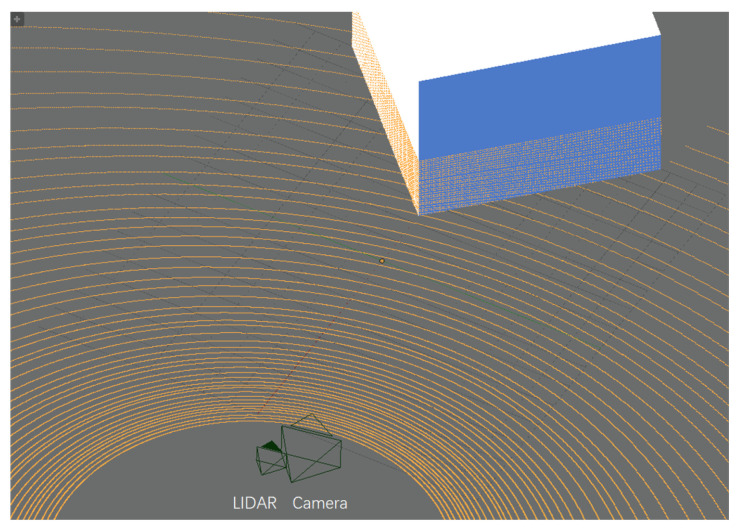
In this paper, we introduce a novel approach to estimate the extrinsic parameters between a LiDAR and a camera. Our method is based on line correspondences between the LiDAR point clouds and camera images. We solve the rotation matrix with 3D-2D infinity point pairs extracted from parallel lines. Then, the translation vector can be solved based on the point-on-line constraint. Different from other target-based methods, this method can be performed simply without preparing specific calibration objects because parallel lines are commonly presented in the environment. We validate our algorithm on both simulated and real data. Error analysis shows that our method can perform well in terms of robustness and accuracy.
在本文中,我们介绍了一种估计激光雷达和相机之间外部参数的新方法。我们的方法基于激光雷达点云和相机图像之间的线对应关系。我们利用从平行线中提取的3D-2D无穷远点对来求解旋转矩阵。然后,基于线上点约束求解平移向量。与其他基于目标的方法不同,该方法无需准备特定的校准物体即可简单执行,因为环境中通常会出现平行线。我们在模拟数据和真实数据上都验证了我们的算法。误差分析表明,我们的方法在鲁棒性和准确性方面都能表现良好。