Giacomini Emanuele, Brizi Leonardo, Di Giammarino Luca, Salem Omar, Perugini Patrizio, Grisetti Giorgio
Department of Computer, Control, and Management Engineering "Antonio Ruberti", Sapienza University of Rome, 00185 Rome, Italy.
Sensors (Basel). 2024 Feb 1;24(3):956. doi: 10.3390/s24030956.
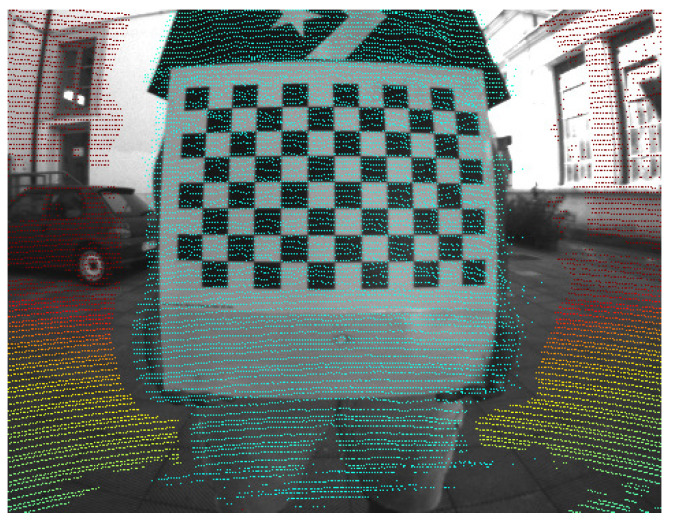
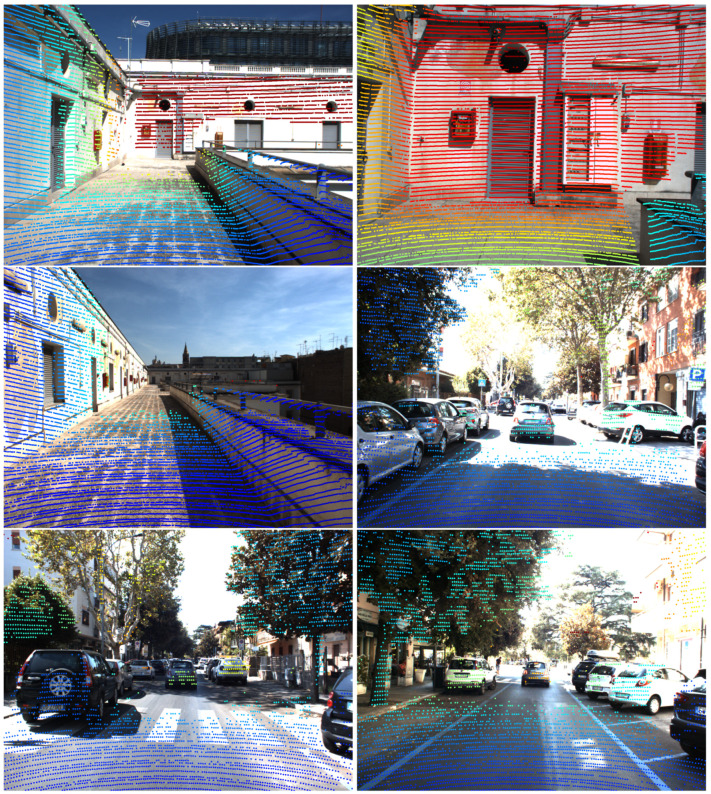
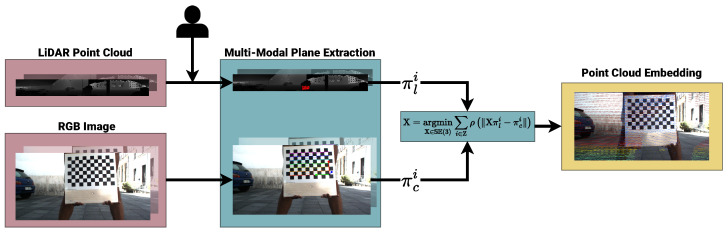
Modern visual perception techniques often rely on multiple heterogeneous sensors to achieve accurate and robust estimates. Knowledge of their relative positions is a mandatory prerequisite to accomplish sensor fusion. Typically, this result is obtained through a calibration procedure that correlates the sensors' measurements. In this context, we focus on LiDAR and RGB sensors that exhibit complementary capabilities. Given the sparsity of LiDAR measurements, current state-of-the-art calibration techniques often rely on complex or large calibration targets to resolve the relative pose estimation. As such, the geometric properties of the targets may hinder the calibration procedure in those cases where an ad hoc environment cannot be guaranteed. This paper addresses the problem of LiDAR-RGB calibration using common calibration patterns (i.e., A3 chessboard) with minimal human intervention. Our approach exploits the flatness of the target to find associations between the sensors' measurements, leading to robust features and retrieval of the solution through nonlinear optimization. The results of quantitative and comparative experiments with other state-of-the-art approaches show that our simple schema performs on par or better than existing methods that rely on complex calibration targets.
现代视觉感知技术通常依靠多个异构传感器来实现准确且稳健的估计。了解它们的相对位置是完成传感器融合的必要前提。通常,这个结果是通过将传感器测量值关联起来的校准程序获得的。在此背景下,我们聚焦于具有互补能力的激光雷达(LiDAR)和RGB传感器。鉴于激光雷达测量的稀疏性,当前的先进校准技术通常依赖复杂或大型校准目标来解决相对位姿估计问题。因此,在无法保证特定环境的情况下,目标的几何特性可能会妨碍校准程序。本文解决了使用普通校准图案(即A3棋盘)且人工干预最少的激光雷达 - RGB校准问题。我们的方法利用目标的平面特性来找到传感器测量值之间的关联,从而产生稳健的特征,并通过非线性优化检索解决方案。与其他先进方法进行的定量和对比实验结果表明,我们的简单方案与依赖复杂校准目标的现有方法表现相当或更优。