Miclea Razvan-Catalin, Dughir Ciprian, Alexa Florin, Sandru Florin, Silea Ioan
Automation and Applied Informatics Department, Politehnica University Timisoara, 300006 Timisoara, Romania.
Communication Department, Politehnica University Timisoara, 300006 Timisoara, Romania.
Sensors (Basel). 2020 Nov 5;20(21):6322. doi: 10.3390/s20216322.
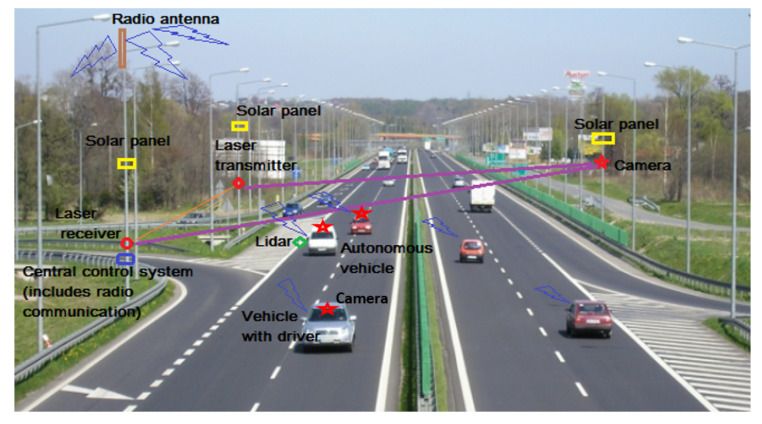
Visibility is a critical factor for transportation, even if we refer to air, water, or ground transportation. The biggest trend in the automotive industry is autonomous driving, the number of autonomous vehicles will increase exponentially, prompting changes in the industry and user segment. Unfortunately, these vehicles still have some drawbacks and one, always in attention and topical, will be treated in this paper-visibility distance issue in bad weather conditions, particularly in fog. The way and the speed with which vehicles will determine objects, obstacles, pedestrians, or traffic signs, especially in bad visibility, will determine how the vehicle will behave. In this paper, a new experimental set up is featured, for analyzing the effect of the fog when the laser and LIDAR (Light Detection And Ranging) radiation are used in visibility distance estimation on public roads. While using our experimental set up, in the laboratory, the information offered by these measurement systems (laser and LIDAR) are evaluated and compared with results offered by human observers in the same fog conditions. The goal is to validate and unitarily apply the results regarding visibility distance, based on information arrives from different systems that are able to estimate this parameter (in foggy weather conditions). Finally, will be notifying the drivers in case of unexpected situations. It is a combination of stationary and of moving systems. The stationary system will be installed on highways or express roads in areas prone to fog, while the moving systems are, or can be, directly installed on the vehicles (autonomous but also non-autonomous).
能见度是交通运输中的一个关键因素,无论是航空、水路还是地面交通。汽车行业最大的趋势是自动驾驶,自动驾驶车辆的数量将呈指数级增长,这促使行业和用户群体发生变化。不幸的是,这些车辆仍存在一些缺点,本文将探讨其中一个一直备受关注且热门的问题——恶劣天气条件下的能见度距离问题,尤其是在雾天。车辆确定物体、障碍物、行人或交通标志的方式和速度,特别是在能见度不佳的情况下,将决定车辆的行为方式。本文介绍了一种新的实验装置,用于分析在公共道路上使用激光和激光雷达(光探测与测距)辐射进行能见度距离估计时雾的影响。在实验室使用我们的实验装置时,会对这些测量系统(激光和激光雷达)提供的信息进行评估,并与在相同雾天条件下人类观察者提供的结果进行比较。目标是基于来自能够估计该参数(在雾天天气条件下)的不同系统的信息,验证并统一应用关于能见度距离的结果。最后,在出现意外情况时会通知驾驶员。它是固定系统和移动系统的组合。固定系统将安装在容易出现雾的高速公路或快速道路上,而移动系统则可以直接安装在车辆上(包括自动驾驶和非自动驾驶车辆)。