Department of Highway & Transportation Research, Korea Institute of Civil Engineering and Building Technology, Goyang-si 10223, Gyeonggi-do, Republic of Korea.
Sensors (Basel). 2023 Mar 9;23(6):2972. doi: 10.3390/s23062972.
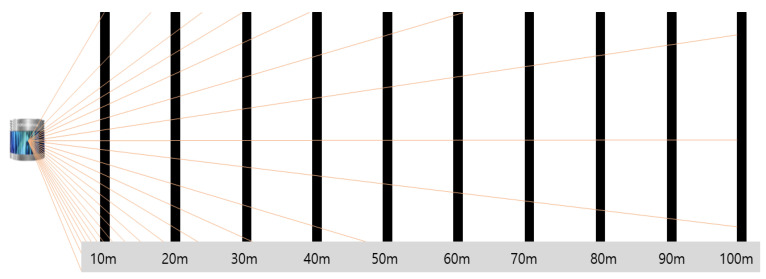
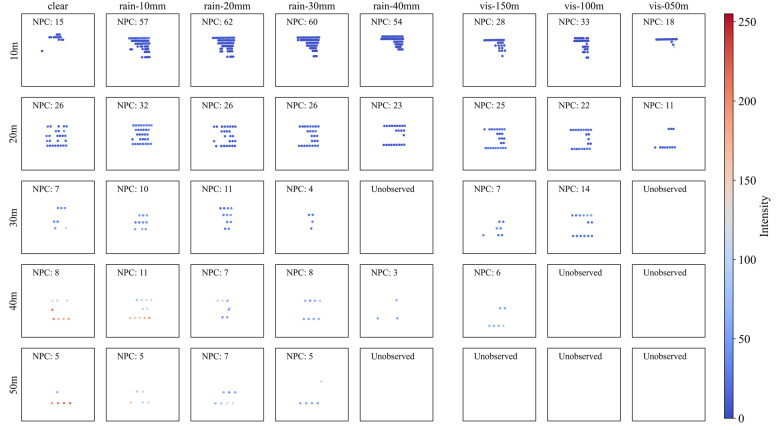
Light detection and ranging (LiDAR) is widely used in autonomous vehicles to obtain precise 3D information about surrounding road environments. However, under bad weather conditions, such as rain, snow, and fog, LiDAR-detection performance is reduced. This effect has hardly been verified in actual road environments. In this study, tests were conducted with different precipitation levels (10, 20, 30, and 40 mm/h) and fog visibilities (50, 100, and 150 m) on actual roads. Square test objects (60 × 60 cm) made of retroreflective film, aluminum, steel, black sheet, and plastic, commonly used in Korean road traffic signs, were investigated. Number of point clouds (NPC) and intensity (reflection value of points) were selected as LiDAR performance indicators. These indicators decreased with deteriorating weather in order of light rain (10-20 mm/h), weak fog (<150 m), intense rain (30-40 mm/h), and thick fog (≤50 m). Retroreflective film preserved at least 74% of the NPC under clear conditions with intense rain (30-40 mm/h) and thick fog (<50 m). Aluminum and steel showed non-observation for distances of 20-30 m under these conditions. ANOVA and post hoc tests suggested that these performance reductions were statistically significant. Such empirical tests should clarify the LiDAR performance degradation.
激光雷达(LiDAR)广泛应用于自动驾驶汽车中,以获取周围道路环境的精确 3D 信息。然而,在恶劣的天气条件下,如雨、雪和雾,LiDAR 的检测性能会降低。这种影响在实际道路环境中几乎没有得到验证。在本研究中,在实际道路上进行了不同降水水平(10、20、30 和 40mm/h)和雾能见度(50、100 和 150m)的测试。测试了常用作韩国道路交通标志的正方形测试物体(60×60cm),这些测试物体由反射膜、铝、钢、黑片和塑料制成。选择点云数量(NPC)和强度(点的反射值)作为 LiDAR 性能指标。这些指标按雨强(10-20mm/h)、弱雾(<150m)、强雨(30-40mm/h)和浓雾(≤50m)的顺序随着天气恶化而降低。在强雨(30-40mm/h)和浓雾(<50m)条件下,反射膜至少保留了 74%的 NPC。在这些条件下,铝和钢的观测距离为 20-30m。ANOVA 和事后检验表明,这些性能下降具有统计学意义。这些经验测试应该可以明确 LiDAR 性能的降低。