College of Artificial Intelligence, Nankai University, Tianjin 300350, China.
College of Intelligent Systems Science and Engineering, Harbin Engineering University, Harbin 150001, China.
Sensors (Basel). 2020 Dec 3;20(23):6923. doi: 10.3390/s20236923.
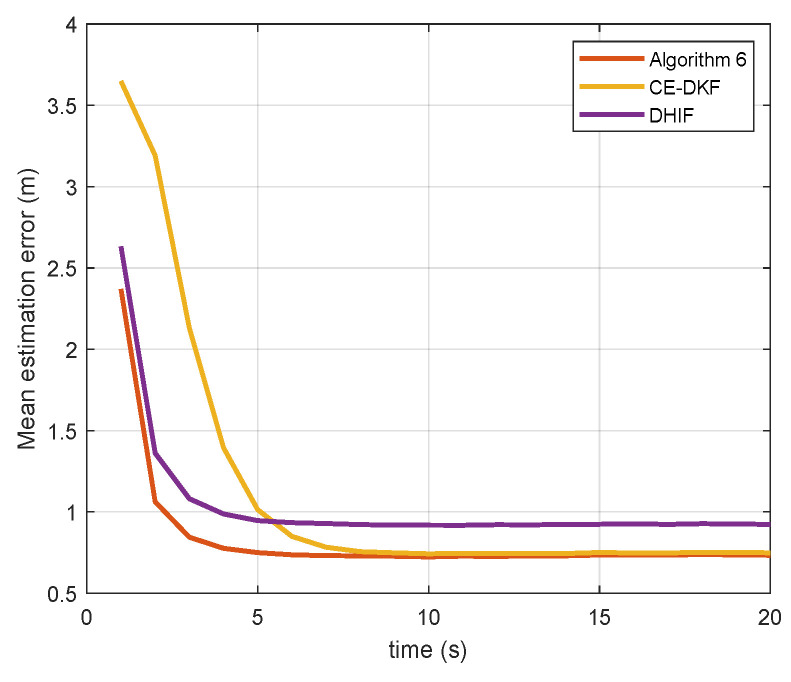
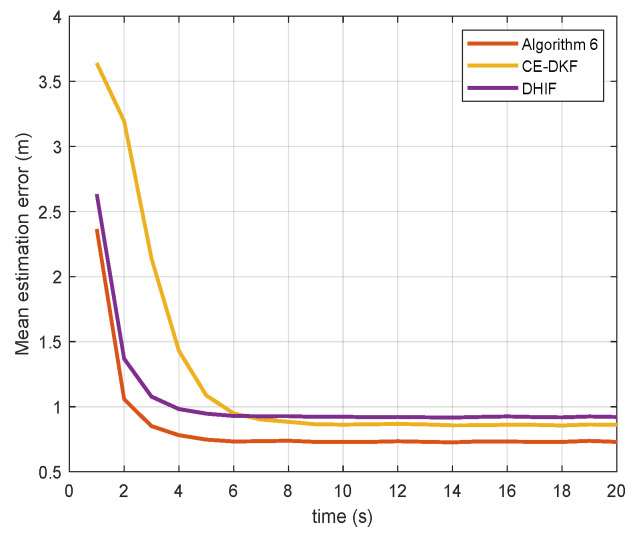
Estimation accuracy is the core performance index of sensor networks. In this study, a kind of distributed Kalman filter based on the non-repeated diffusion strategy is proposed in order to improve the estimation accuracy of sensor networks. The algorithm is applied to the state estimation of distributed sensor networks. In this sensor network, each node only exchanges information with adjacent nodes. Compared with existing diffusion-based distributed Kalman filters, the algorithm in this study improves the estimation accuracy of the networks. Meanwhile, a single-target tracking simulation is performed to analyze and verify the performance of the algorithm. Finally, by discussion, it is proved that the algorithm exhibits good all-round performance, not only regarding estimation accuracy.
估计精度是传感器网络的核心性能指标。在这项研究中,提出了一种基于非重复扩散策略的分布式卡尔曼滤波器,以提高传感器网络的估计精度。该算法应用于分布式传感器网络的状态估计。在这个传感器网络中,每个节点只与相邻节点交换信息。与现有的基于扩散的分布式卡尔曼滤波器相比,本研究中的算法提高了网络的估计精度。同时,进行了单目标跟踪仿真,以分析和验证算法的性能。最后,通过讨论证明了该算法不仅在估计精度方面,而且在整体性能方面都表现出色。