Lu Bing, He Hongwen, Yu Huilong, Wang Hong, Li Guofa, Shi Man, Cao Dongpu
National Engineering Laboratory for Electric Vehicles, Beijing Institute of Technology, Beijing 100081, China.
Department of Mechanical and Mechatronics Engineering, Waterloo University, Waterloo, ON N2L 3G1, Canada.
Sensors (Basel). 2020 Dec 16;20(24):7197. doi: 10.3390/s20247197.
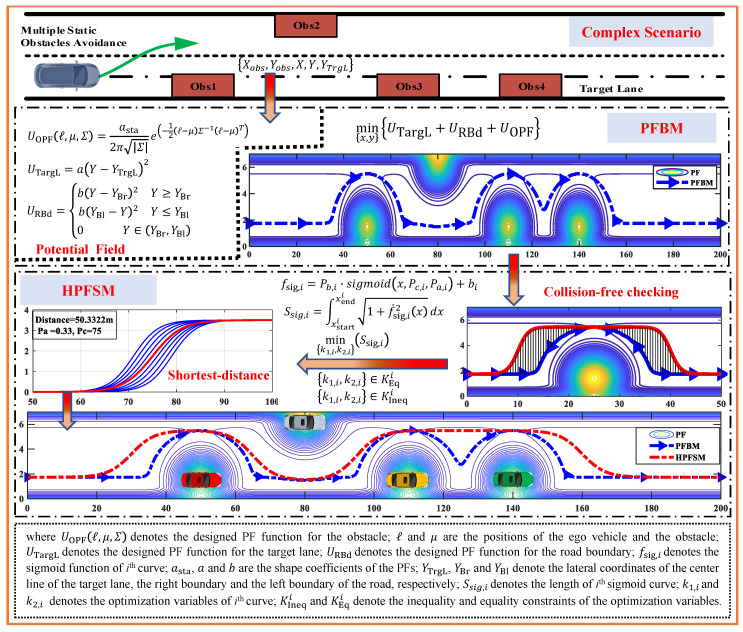
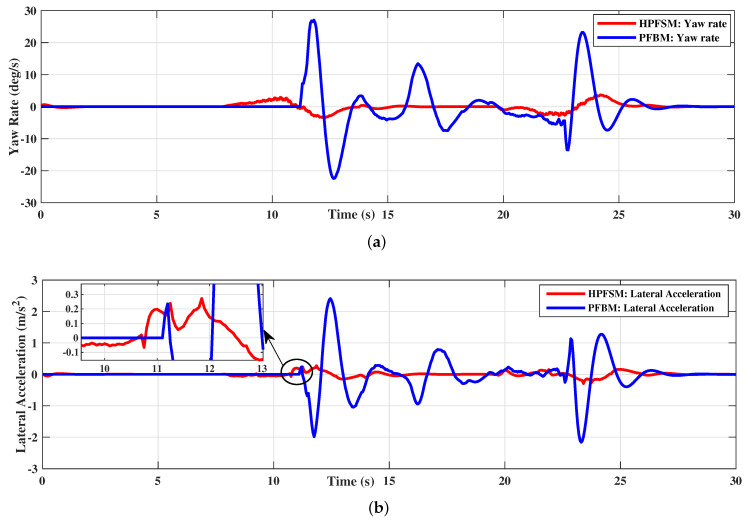
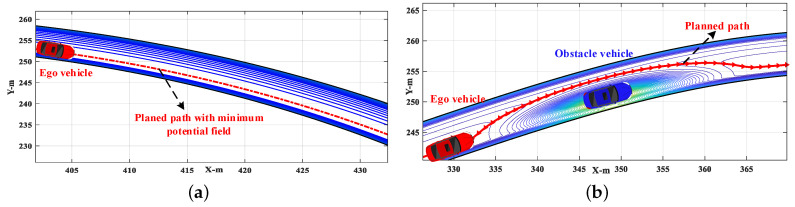
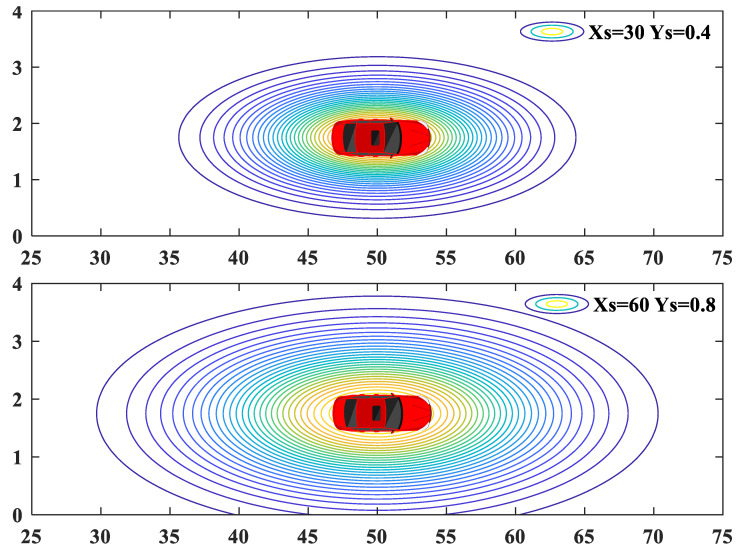
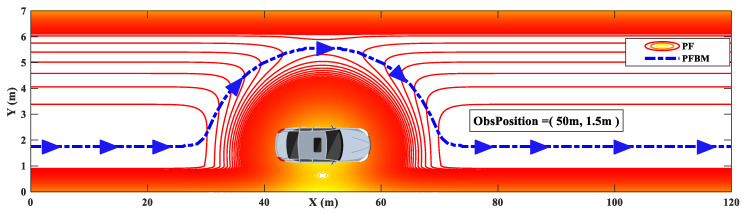
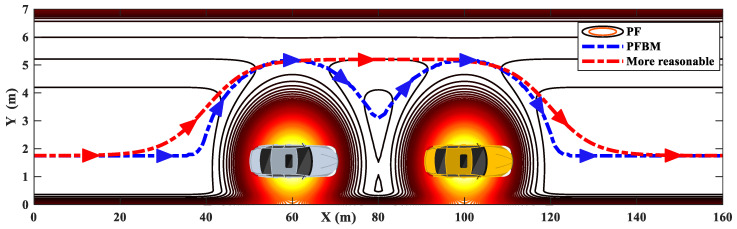
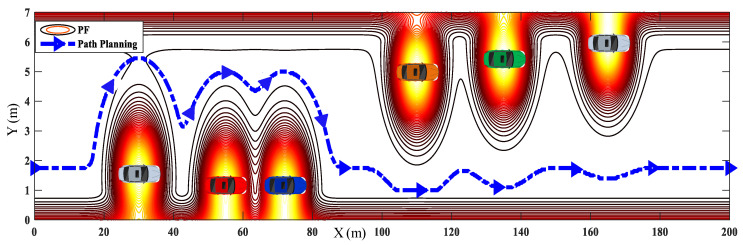
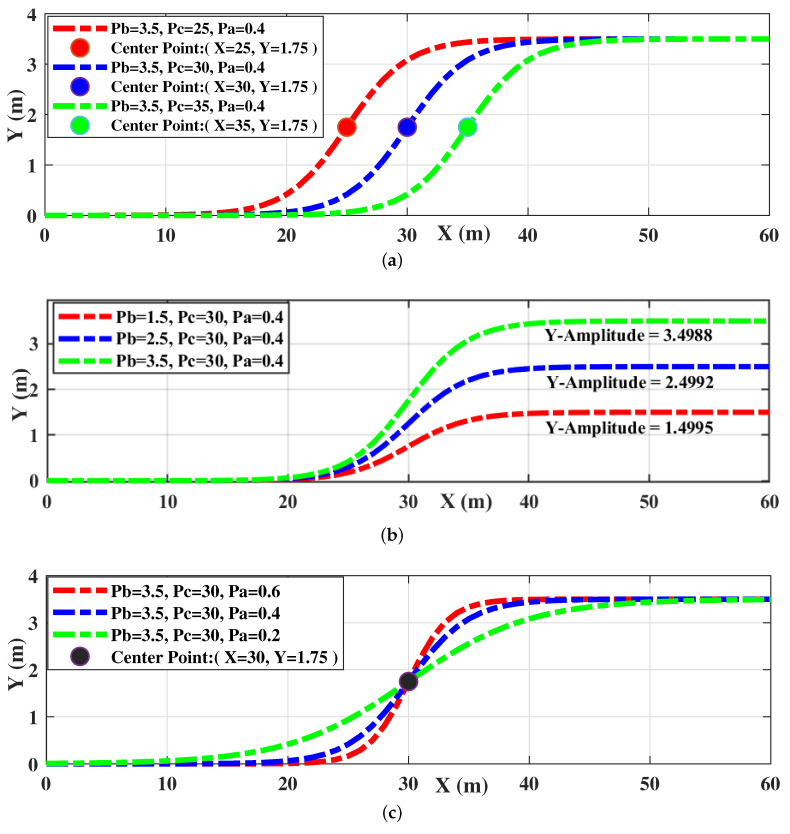
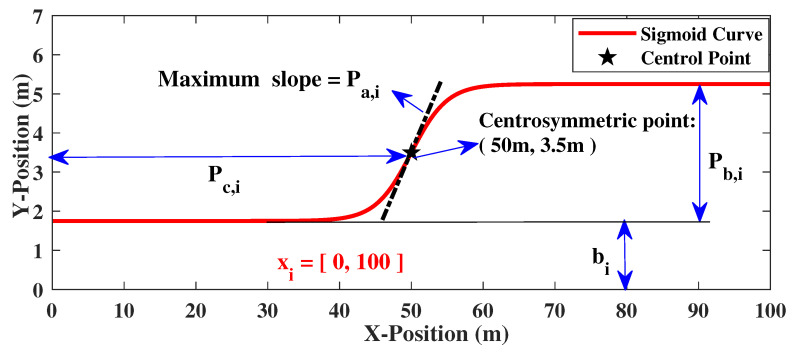
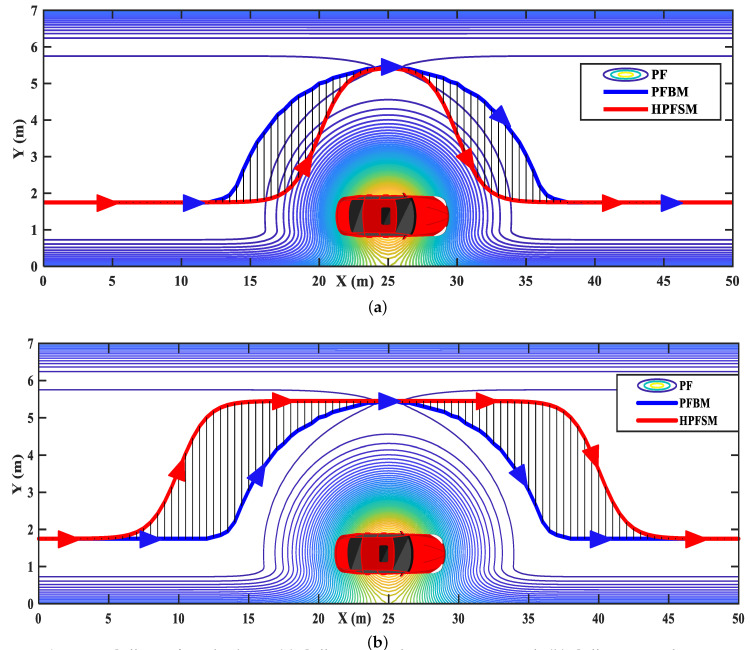
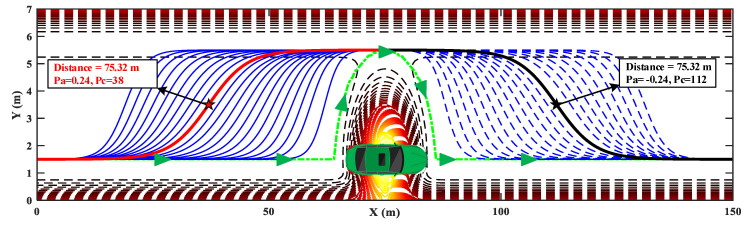
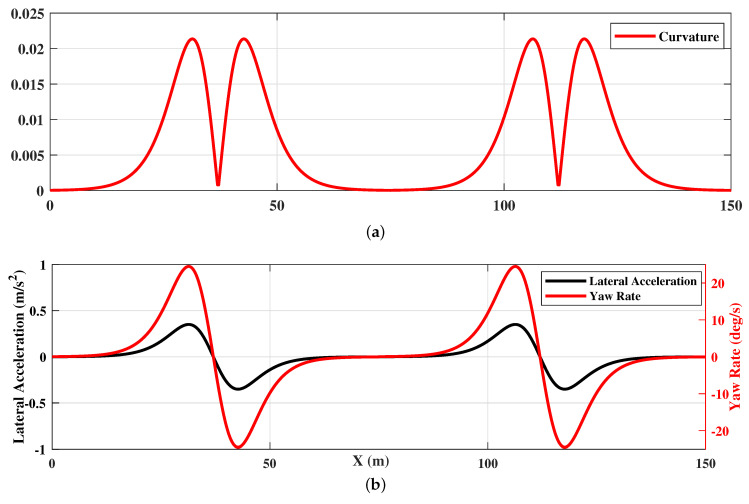
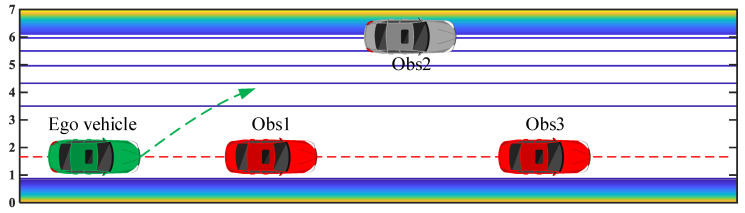
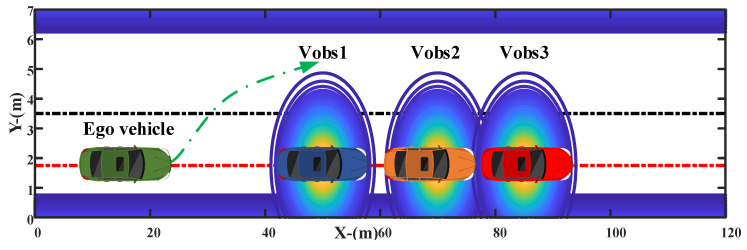
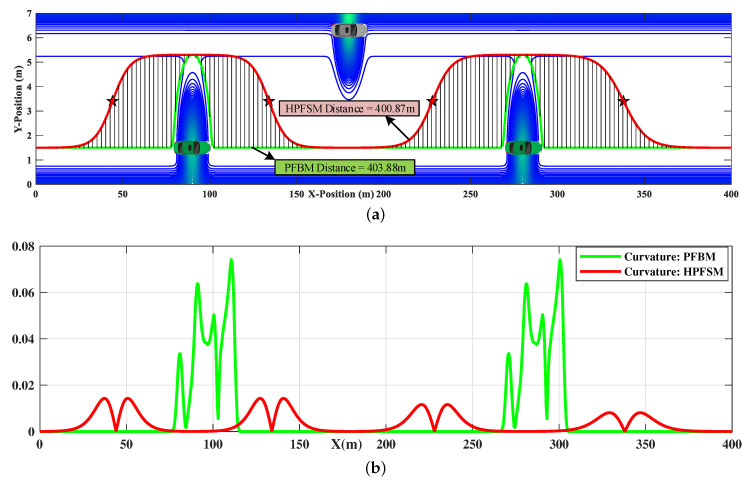
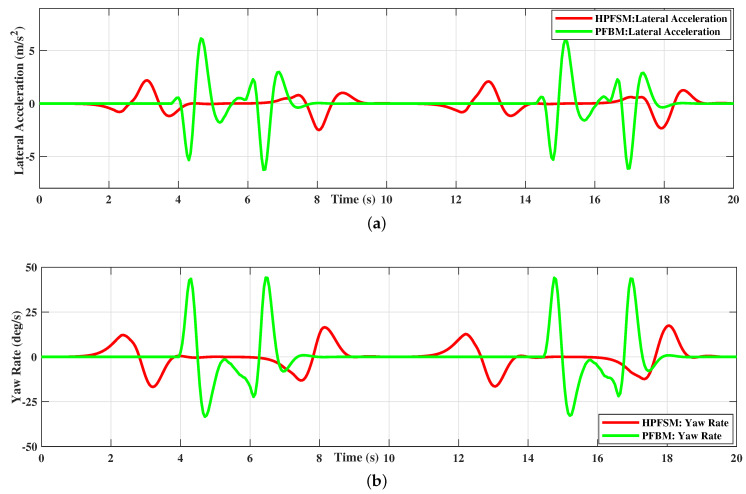
The traditional potential field-based path planning is likely to generate unexpected path by strictly following the minimum potential field, especially in the driving scenarios with multiple obstacles closely distributed. A hybrid path planning is proposed to avoid the unsatisfying path generation and to improve the performance of autonomous driving by combining the potential field with the sigmoid curve. The repulsive and attractive potential fields are redesigned by considering the safety and the feasibility. Based on the objective of the shortest path generation, the optimized trajectory is obtained to improve the vehicle stability and driving safety by considering the constraints of collision avoidance and vehicle dynamics. The effectiveness is examined by simulations in multiobstacle dynamic and static scenarios. The simulation results indicate that the proposed method shows better performance on vehicle stability and ride comfortability than that of the traditional potential field-based method in all the examined scenarios during the autonomous driving.
传统的基于势场的路径规划可能会通过严格遵循最小势场来生成意外路径,特别是在多个障碍物紧密分布的驾驶场景中。提出了一种混合路径规划方法,通过将势场与Sigmoid曲线相结合,避免生成不理想的路径,并提高自动驾驶性能。通过考虑安全性和可行性,重新设计了排斥势场和吸引势场。基于生成最短路径的目标,通过考虑避撞和车辆动力学的约束,获得优化轨迹以提高车辆稳定性和驾驶安全性。通过在多障碍物动态和静态场景中的仿真来检验其有效性。仿真结果表明,在自动驾驶的所有测试场景中,所提出的方法在车辆稳定性和乘坐舒适性方面比传统的基于势场的方法表现更好。