ECE Department, McMaster University, Hamilton, ON L8S 4L8, Canada.
Rutherford Appleton Laboratory, Scientific Computing Department, Science and Technology Facilities Council, Didcot OX11 0FA, UK.
Sensors (Basel). 2021 Jan 11;21(2):461. doi: 10.3390/s21020461.
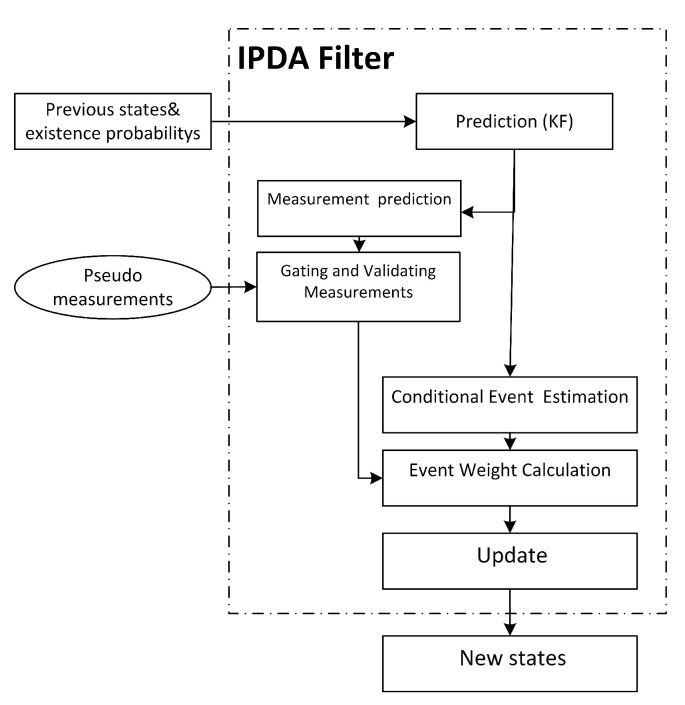
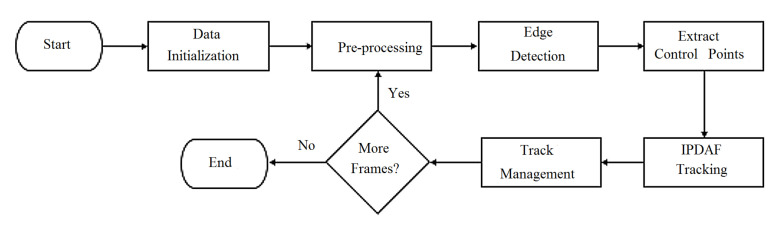
Detection of multiple lane markings on road surfaces is an important aspect of autonomous vehicles. Although a number of approaches have been proposed to detect lanes, detecting multiple lane markings, particularly across a large number of frames and under varying lighting conditions, in a consistent manner is still a challenging problem. In this paper, we propose a novel approach for detecting multiple lanes across a large number of frames and under various lighting conditions. Instead of resorting to the conventional approach of processing each frame to detect lanes, we treat the overall problem as a multitarget tracking problem across space and time using the integrated probabilistic data association filter (IPDAF) as our basis filter. We use the intensity of the pixels as an augmented feature to correctly group multiple lane markings using the Hough transform. By representing these extracted lane markings as splines, we then identify a set of control points, which becomes a set of targets to be tracked over a period of time, and thus across a large number of frames. We evaluate our approach on two different fronts, covering both model- and machine-learning-based approaches, using two different datasets, namely the Caltech and TuSimple lane detection datasets, respectively. When tested against model-based approach, the proposed approach can offer as much as 5%, 12%, and 3% improvements on the true positive, false positive, and false positives per frame rates compared to the best alternative approach, respectively. When compared against a state-of-the-art machine learning technique, particularly against a supervised learning method, the proposed approach offers 57%, 31%, 4%, and 9× improvements on the false positive, false negative, accuracy, and frame rates. Furthemore, the proposed approach retains the explainability, or in other words, the cause of actions of the proposed approach can easily be understood or explained.
检测路面上的多个车道标记是自动驾驶车辆的一个重要方面。尽管已经提出了许多方法来检测车道,但以一致的方式检测多个车道标记,特别是在大量帧和不同光照条件下,仍然是一个具有挑战性的问题。在本文中,我们提出了一种新的方法,用于在大量帧和各种光照条件下检测多个车道。我们没有采用传统的方法,即处理每一帧来检测车道,而是将整体问题视为一个跨空间和时间的多目标跟踪问题,使用集成概率数据关联滤波器(IPDAF)作为我们的基础滤波器。我们使用像素的强度作为一个增强特征,使用霍夫变换正确地将多个车道标记分组。通过将这些提取的车道标记表示为样条曲线,然后确定一组控制点,这些控制点成为在一段时间内(即跨越大量帧)要跟踪的一组目标。我们从两个不同的方面评估我们的方法,分别涵盖基于模型和基于机器学习的方法,并使用两个不同的数据集,即 Caltech 和 TuSimple 车道检测数据集。在与基于模型的方法进行测试时,与最佳替代方法相比,所提出的方法在真阳性、假阳性和每帧假阳性率方面可以分别提高 5%、12%和 3%。与最先进的机器学习技术(特别是监督学习方法)相比,所提出的方法在假阳性、假阴性、准确性和帧率方面分别提高了 57%、31%、4%和 9 倍。此外,所提出的方法保留了可解释性,或者换句话说,很容易理解或解释所提出方法的动作原因。