Eslami Mehrdad, Saadatseresht Mohammad
School of Surveying and Geospatial Engineering, College of Engineering, University of Tehran, Tehran 1439957131, Iran.
Sensors (Basel). 2021 Jan 5;21(1):317. doi: 10.3390/s21010317.
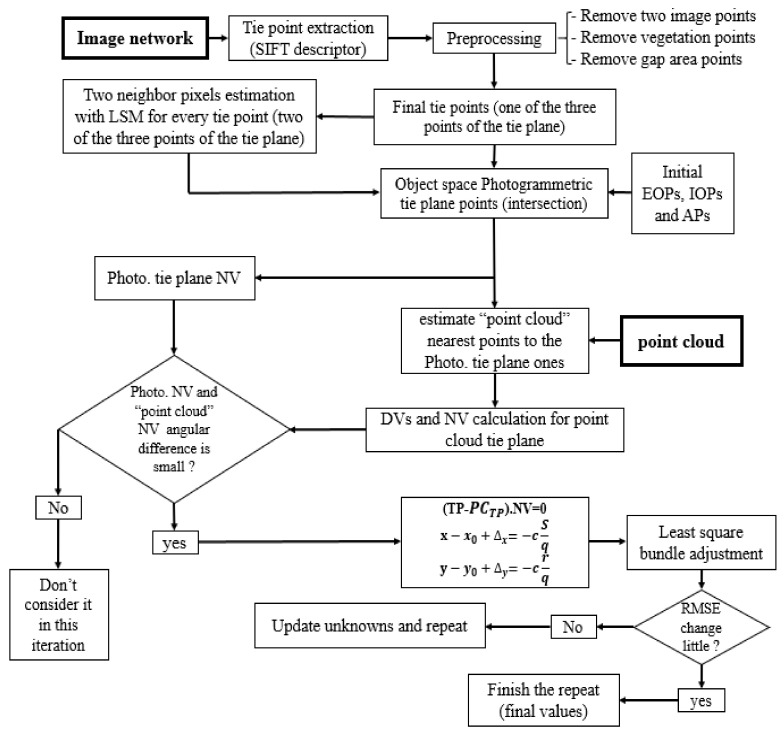
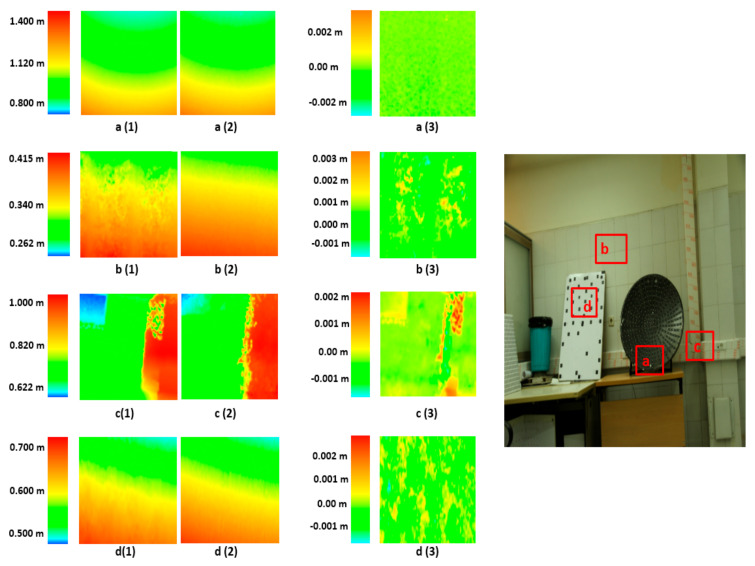
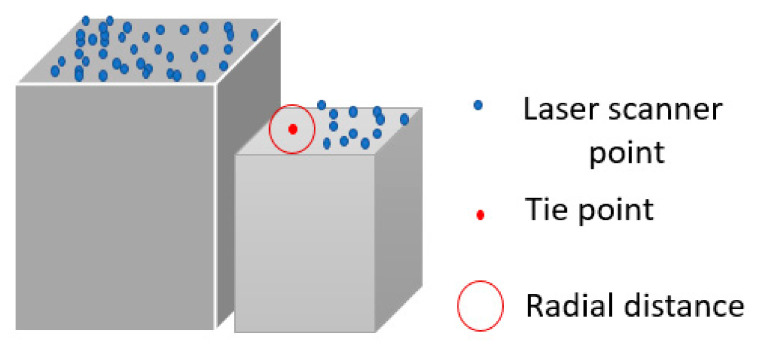
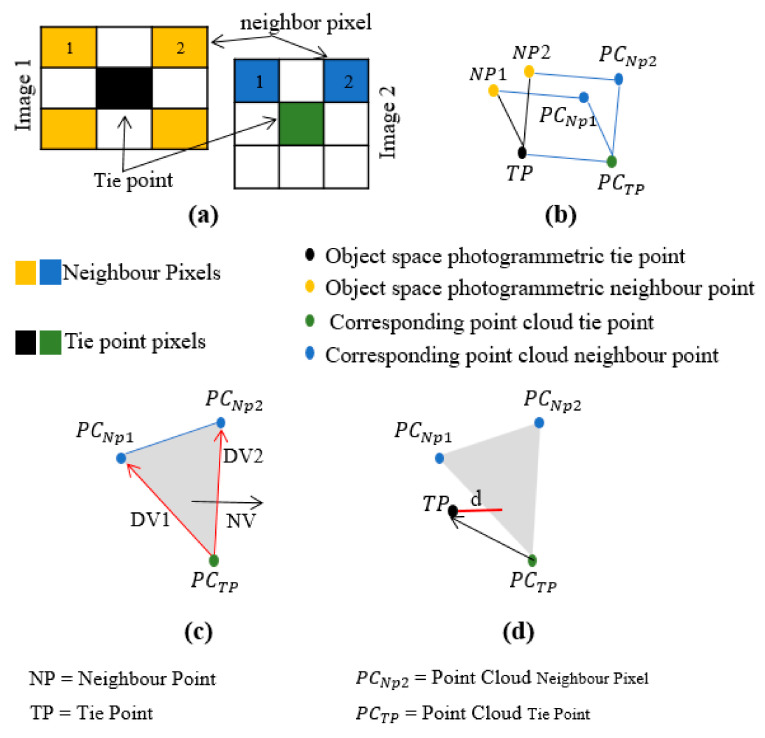
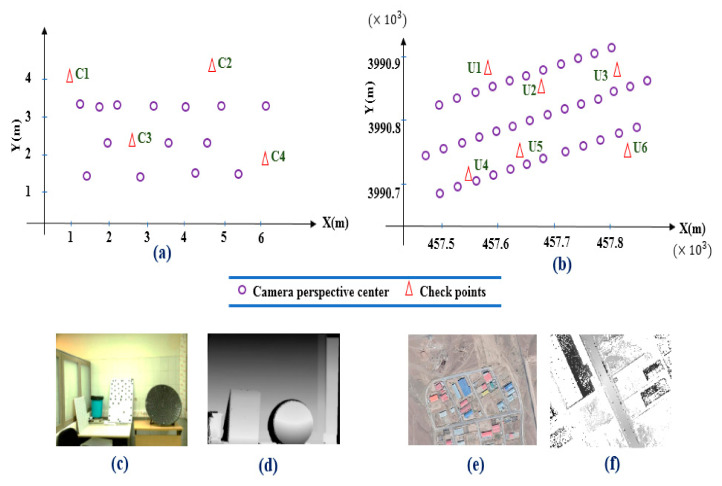
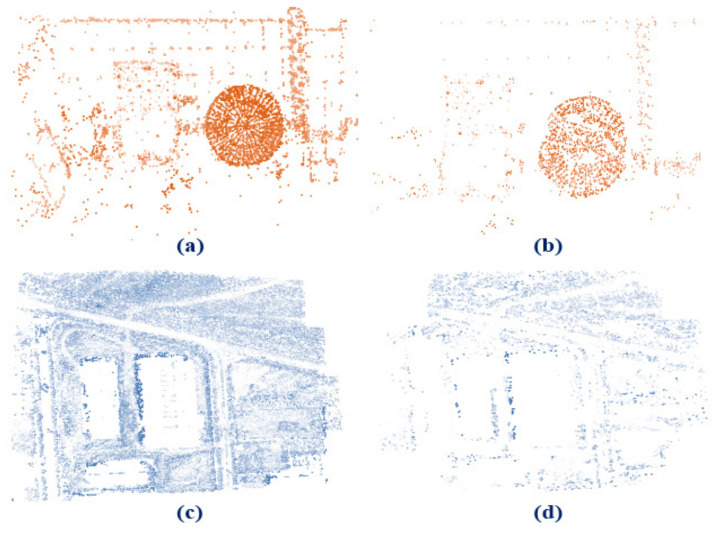
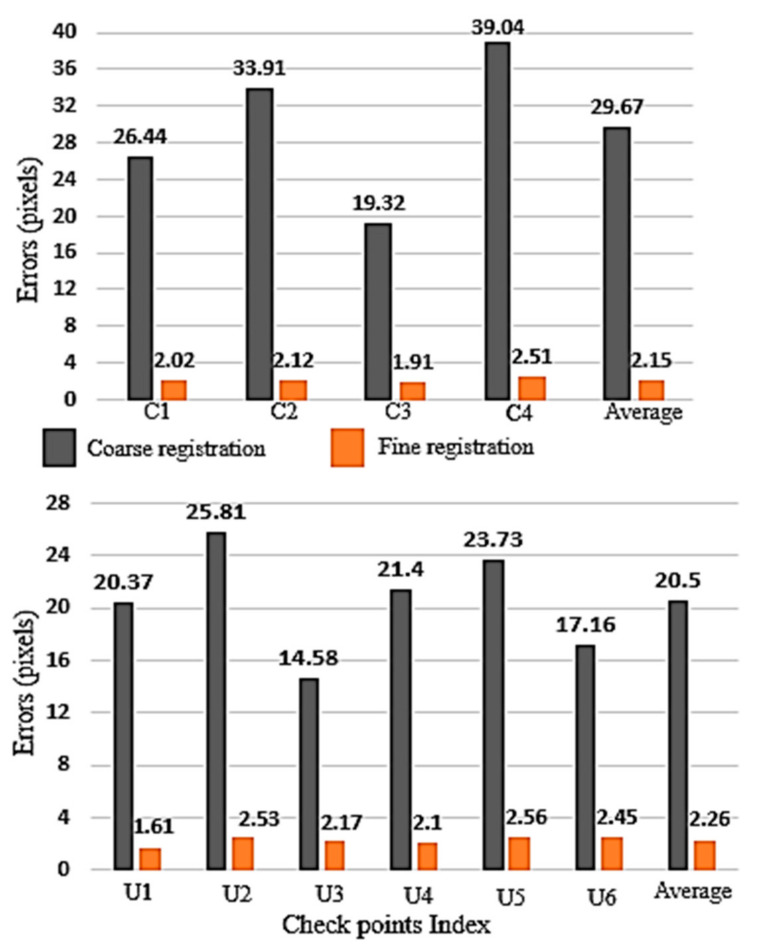
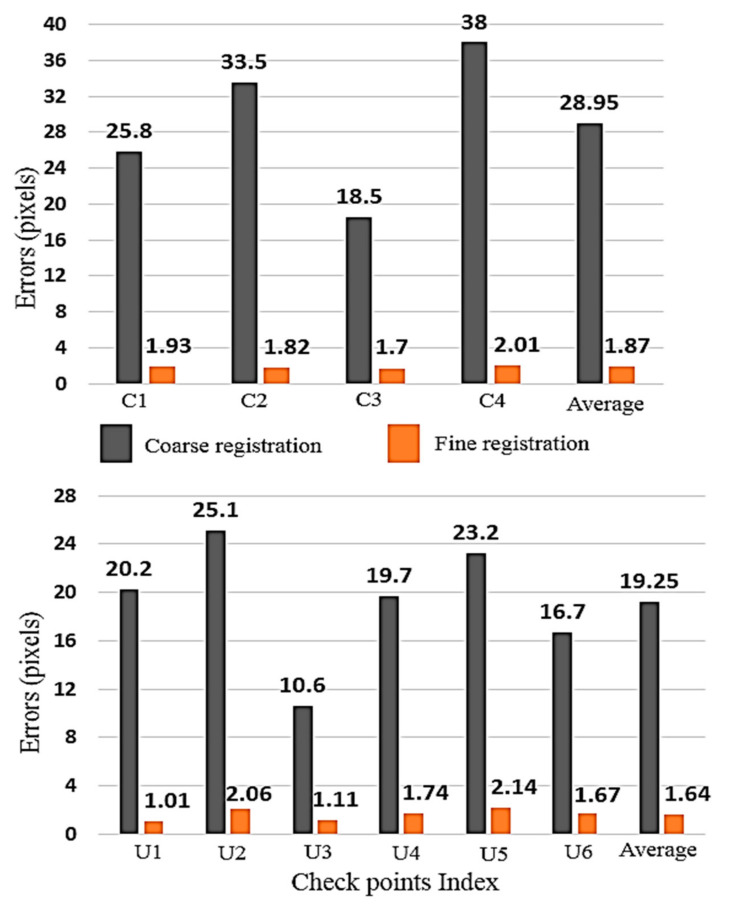
Cameras and laser scanners are complementary tools for a 2D/3D information generation. Systematic and random errors cause the misalignment of the multi-sensor imagery and point cloud data. In this paper, a novel feature-based approach is proposed for imagery and point cloud fine registration. The tie points and its two neighbor pixels are matched in the overlap images, which are intersected in the object space to create the differential tie plane. A preprocessing is applied to the corresponding tie points and non-robust ones are removed. Initial coarse Exterior Orientation Parameters (EOPs), Interior Orientation Parameters (IOPs), and Additional Parameters (APs) are used to transform tie plane points to the object space. Then, the nearest points of the point cloud data to the transformed tie plane points are estimated. These estimated points are used to calculate Directional Vectors (DV) of the differential planes. As a constraint equation along with the collinearity equation, each object space tie point is forced to be located on the point cloud differential plane. Two different indoor and outdoor experimental data are used to assess the proposed approach. Achieved results show about 2.5 pixels errors on checkpoints. Such results demonstrated the robustness and practicality of the proposed approach.
相机和激光扫描仪是用于生成二维/三维信息的互补工具。系统误差和随机误差会导致多传感器图像和点云数据的不对准。本文提出了一种新颖的基于特征的方法用于图像和点云的精细配准。在重叠图像中匹配连接点及其两个相邻像素,这些重叠图像在物空间中相交以创建差分连接平面。对相应的连接点进行预处理并去除不稳定的点。使用初始粗略的外方位参数(EOP)、内方位参数(IOP)和附加参数(AP)将连接平面点转换到物空间。然后,估计点云数据中到变换后的连接平面点最近的点。这些估计点用于计算差分平面的方向向量(DV)。作为与共线方程一起的约束方程,每个物空间连接点被迫位于点云差分平面上。使用两种不同的室内和室外实验数据来评估所提出的方法。获得的结果表明在检查点上约有2.5像素的误差。这些结果证明了所提出方法的稳健性和实用性。