Guangxi Laboratory on the Study of Coral Reefs in the South China Sea, Guangxi University, Nanning 530004, China.
School of Marine Sciences, Guangxi University, Nanning 530004, China.
Sensors (Basel). 2018 Jun 1;18(6):1770. doi: 10.3390/s18061770.
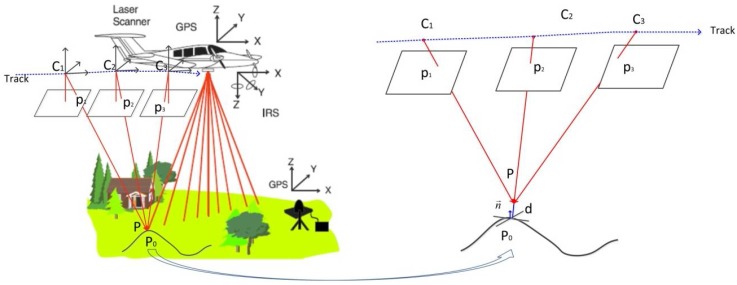
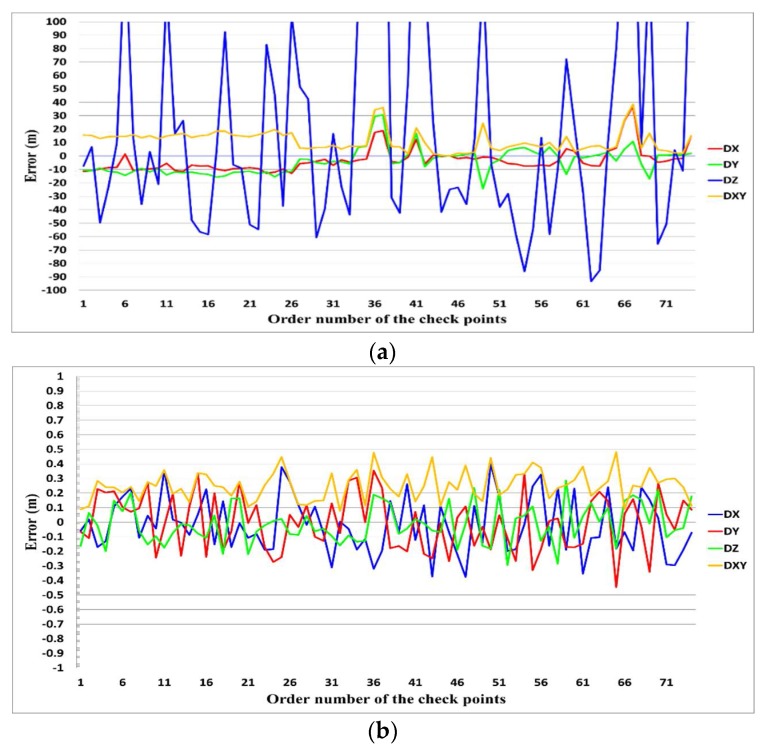
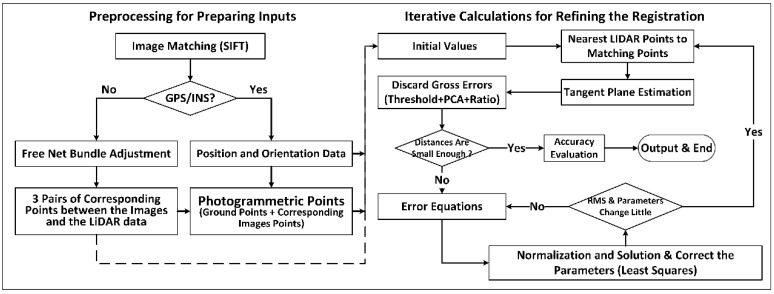
Registration of large-scale optical images with airborne LiDAR data is the basis of the integration of photogrammetry and LiDAR. However, geometric misalignments still exist between some aerial optical images and airborne LiDAR point clouds. To eliminate such misalignments, we extended a method for registering close-range optical images with terrestrial LiDAR data to a variety of large-scale aerial optical images and airborne LiDAR data. The fundamental principle is to minimize the distances from the photogrammetric matching points to the terrestrial LiDAR data surface. Except for the satisfactory efficiency of about 79 s per 6732 × 8984 image, the experimental results also show that the unit weighted root mean square (RMS) of the image points is able to reach a sub-pixel level (0.45 to 0.62 pixel), and the actual horizontal and vertical accuracy can be greatly improved to a high level of 1/4⁻1/2 (0.17⁻0.27 m) and 1/8⁻1/4 (0.10⁻0.15 m) of the average LiDAR point distance respectively. Finally, the method is proved to be more accurate, feasible, efficient, and practical in variety of large-scale aerial optical image and LiDAR data.
大规模光学图像与机载激光雷达数据的配准是摄影测量与激光雷达集成的基础。然而,一些航空光学图像与机载激光雷达点云之间仍然存在几何配准误差。为了消除这些误差,我们将一种用于将近景光学图像与地面激光雷达数据配准的方法扩展到各种大规模航空光学图像和机载激光雷达数据中。其基本原理是使摄影测量匹配点到地面激光雷达数据表面的距离最小化。除了约 79 秒/6732×8984 图像的令人满意的效率外,实验结果还表明,图像点的单位加权均方根 (RMS) 能够达到亚像素水平 (0.45 到 0.62 像素),并且实际水平和垂直精度可以大大提高到平均激光雷达点距离的 1/4⁻1/2(0.17⁻0.27 m)和 1/8⁻1/4(0.10⁻0.15 m)的高精度。最后,该方法被证明在各种大规模航空光学图像和激光雷达数据中更加准确、可行、高效和实用。