Yirmibeşoğlu Osman Dogan, Oshiro Tyler, Olson Gina, Palmer Camille, Mengüç Yigit
Collaborative Robotics and Intelligent Systems Institute, Oregon State University, Corvallis, OR, United States.
School of Nuclear Science and Engineering, Oregon State University, Corvallis, OR, United States.
Front Robot AI. 2019 May 24;6:40. doi: 10.3389/frobt.2019.00040. eCollection 2019.
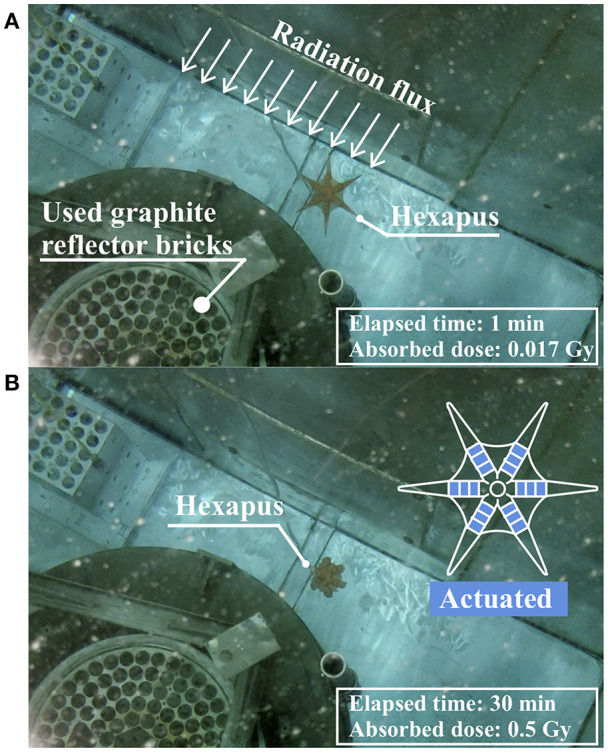
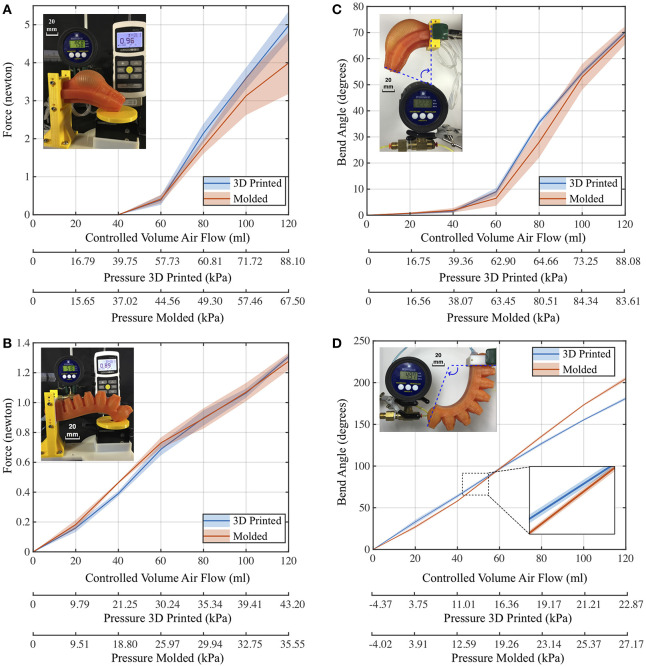
Robots have an important role during inspection, clean-up, and sample collection in unstructured radiation environments inaccessible to humans. The advantages of soft robots, such as body morphing, high compliance, and energy absorption during impact, make them suitable for operating under extreme conditions. Despite their promise, the usefulness of soft robots under a radiation environment has yet to be assessed. In this work, we evaluate the effectiveness of soft robots fabricated from polydimethylsiloxane (PDMS), a common fabrication material, under radiation for the first time. We investigated gamma-induced mechanical damage in the PDMS materials' mechanical properties, including elongation, tensile strength, and stiffness. We selected three radiation environments from the nuclear industry to represent a wide range of radiation and then submerged a 3D printed hexapus robot into a radiation environment to estimate its operation time. Finally, to test the reliability of the 3D printed soft robots, we compared their performances with molded counterparts. To analyze performance results in detail, we also investigated dimensional errors and the effects of fabrication methods, nozzle size, and print direction on the stiffness of PDMS material. Results of this study show that with increasing exposure to gamma irradiation, the mechanical properties of PDMS decrease in functionality but are minimally impacted up to 20 kGy gamma radiation. Considering the fractional changes to the PDMS mechanical properties, it is safe to assume that soft robots could operate for 12 h in two of the three proposed radiation environments. We also verified that the 3D printed soft robots can perform better than or equal to their molded counterparts while being more reliable.
在人类无法进入的非结构化辐射环境中,机器人在检查、清理和样本采集过程中发挥着重要作用。软机器人具有诸如身体变形、高柔顺性以及撞击时能量吸收等优点,使其适合在极端条件下运行。尽管软机器人前景广阔,但它们在辐射环境中的实用性尚未得到评估。在这项工作中,我们首次评估了由常见制造材料聚二甲基硅氧烷(PDMS)制成的软机器人在辐射环境下的有效性。我们研究了伽马射线对PDMS材料机械性能的损伤,包括伸长率、拉伸强度和刚度。我们从核工业中选取了三种辐射环境来代表广泛的辐射范围,然后将一个3D打印的六足机器人浸入辐射环境中以估计其运行时间。最后,为了测试3D打印软机器人的可靠性,我们将它们的性能与模制机器人进行了比较。为了详细分析性能结果,我们还研究了尺寸误差以及制造方法、喷嘴尺寸和打印方向对PDMS材料刚度的影响。这项研究的结果表明,随着伽马射线照射量的增加,PDMS的机械性能在功能上会下降,但在高达20千戈瑞的伽马辐射下受到的影响最小。考虑到PDMS机械性能的变化程度,可以安全地假设软机器人在三种提议的辐射环境中的两种环境下能够运行12小时。我们还验证了3D打印的软机器人能够表现得比模制机器人更好或与之相当,同时更可靠。