Bell J F, Maki J N, Mehall G L, Ravine M A, Caplinger M A, Bailey Z J, Brylow S, Schaffner J A, Kinch K M, Madsen M B, Winhold A, Hayes A G, Corlies P, Tate C, Barrington M, Cisneros E, Jensen E, Paris K, Crawford K, Rojas C, Mehall L, Joseph J, Proton J B, Cluff N, Deen R G, Betts B, Cloutis E, Coates A J, Colaprete A, Edgett K S, Ehlmann B L, Fagents S, Grotzinger J P, Hardgrove C, Herkenhoff K E, Horgan B, Jaumann R, Johnson J R, Lemmon M, Paar G, Caballo-Perucha M, Gupta S, Traxler C, Preusker F, Rice M S, Robinson M S, Schmitz N, Sullivan R, Wolff M J
Arizona State Univ., Tempe, AZ USA.
JPL/Caltech, Pasadena, CA USA.
Space Sci Rev. 2021;217(1):24. doi: 10.1007/s11214-020-00755-x. Epub 2021 Feb 15.
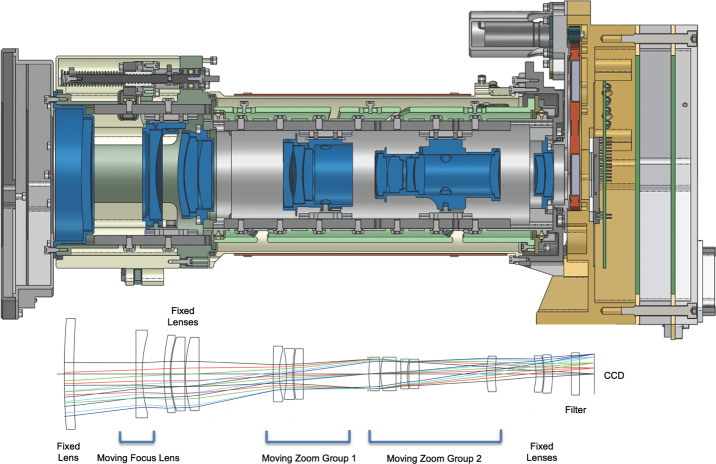
Mastcam-Z is a multispectral, stereoscopic imaging investigation on the Mars 2020 mission's rover. Mastcam-Z consists of a pair of focusable, 4:1 zoomable cameras that provide broadband red/green/blue and narrowband 400-1000 nm color imaging with fields of view from 25.6° × 19.2° (26 mm focal length at 283 μrad/pixel) to 6.2° × 4.6° (110 mm focal length at 67.4 μrad/pixel). The cameras can resolve (≥ 5 pixels) ∼0.7 mm features at 2 m and ∼3.3 cm features at 100 m distance. Mastcam-Z shares significant heritage with the Mastcam instruments on the Mars Science Laboratory rover. Each Mastcam-Z camera consists of zoom, focus, and filter wheel mechanisms and a 1648 × 1214 pixel charge-coupled device detector and electronics. The two Mastcam-Z cameras are mounted with a 24.4 cm stereo baseline and 2.3° total toe-in on a camera plate ∼2 m above the surface on the rover's Remote Sensing Mast, which provides azimuth and elevation actuation. A separate digital electronics assembly inside the rover provides power, data processing and storage, and the interface to the rover computer. Primary and secondary Mastcam-Z calibration targets mounted on the rover top deck enable tactical reflectance calibration. Mastcam-Z multispectral, stereo, and panoramic images will be used to provide detailed morphology, topography, and geologic context along the rover's traverse; constrain mineralogic, photometric, and physical properties of surface materials; monitor and characterize atmospheric and astronomical phenomena; and document the rover's sample extraction and caching locations. Mastcam-Z images will also provide key engineering information to support sample selection and other rover driving and tool/instrument operations decisions.
Mastcam-Z是火星2020任务火星车上的一个多光谱立体成像探测设备。Mastcam-Z由一对可聚焦、具备4:1变焦能力的相机组成,能够提供宽带红/绿/蓝以及400 - 1000纳米窄带彩色成像,其视野范围从25.6°×19.2°(283微弧度/像素时焦距为26毫米)到6.2°×4.6°(67.4微弧度/像素时焦距为110毫米)。这些相机在2米距离处能够分辨(≥5像素)约0.7毫米的特征,在100米距离处能够分辨约3.3厘米的特征。Mastcam-Z与火星科学实验室火星车上的Mastcam仪器有诸多共同之处。每个Mastcam-Z相机都由变焦、聚焦和滤光轮机构以及一个1648×1214像素的电荷耦合器件探测器和电子设备组成。两台Mastcam-Z相机安装在火星车遥感桅杆上距地面约2米处的相机板上,立体基线为24.4厘米,总前束角为2.3°,该桅杆提供方位角和仰角驱动。火星车内一个单独的数字电子组件提供电力、数据处理和存储功能,以及与火星车计算机的接口。安装在火星车顶部甲板上的主、次Mastcam-Z校准目标可进行战术反射率校准。Mastcam-Z的多光谱、立体和全景图像将用于提供火星车行驶路线沿途的详细形态、地形和地质背景信息;确定地表物质的矿物学、光度学和物理特性;监测和描述大气及天文现象;记录火星车的样本提取和缓存位置。Mastcam-Z图像还将提供关键工程信息,以支持样本选择以及其他火星车驾驶和工具/仪器操作决策。