Maki J N, Gruel D, McKinney C, Ravine M A, Morales M, Lee D, Willson R, Copley-Woods D, Valvo M, Goodsall T, McGuire J, Sellar R G, Schaffner J A, Caplinger M A, Shamah J M, Johnson A E, Ansari H, Singh K, Litwin T, Deen R, Culver A, Ruoff N, Petrizzo D, Kessler D, Basset C, Estlin T, Alibay F, Nelessen A, Algermissen S
Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA USA.
Malin Space Science Systems, San Diego, CA USA.
Space Sci Rev. 2020;216(8):137. doi: 10.1007/s11214-020-00765-9. Epub 2020 Nov 24.
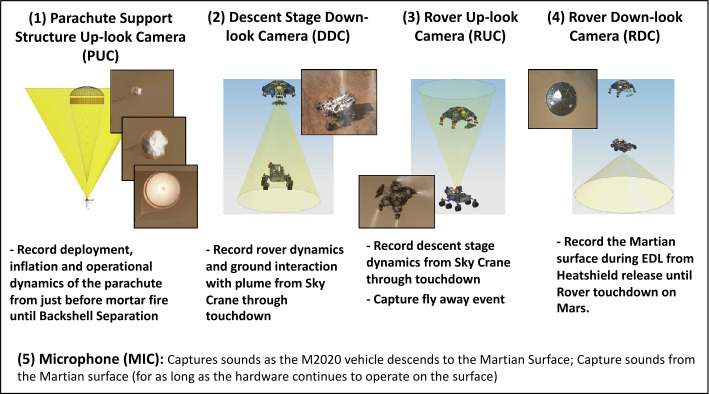
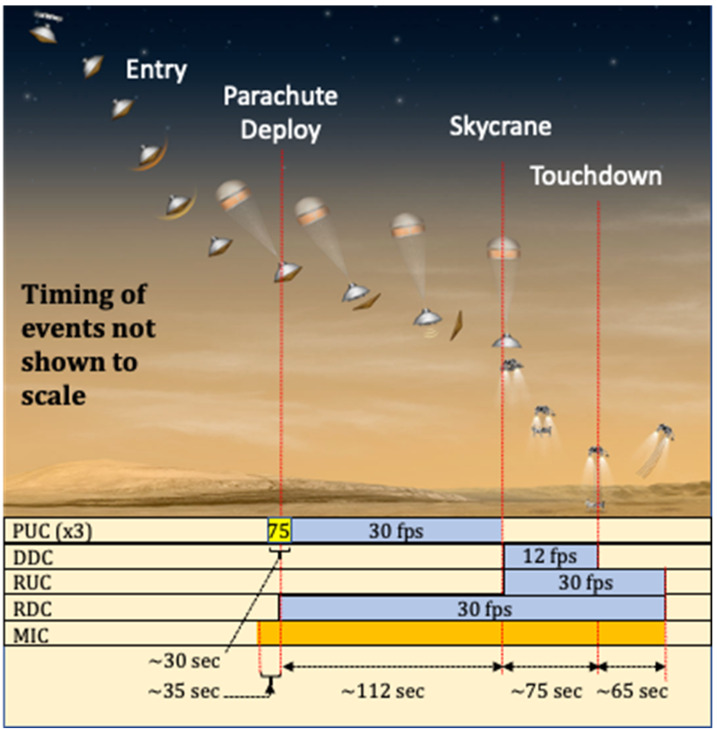
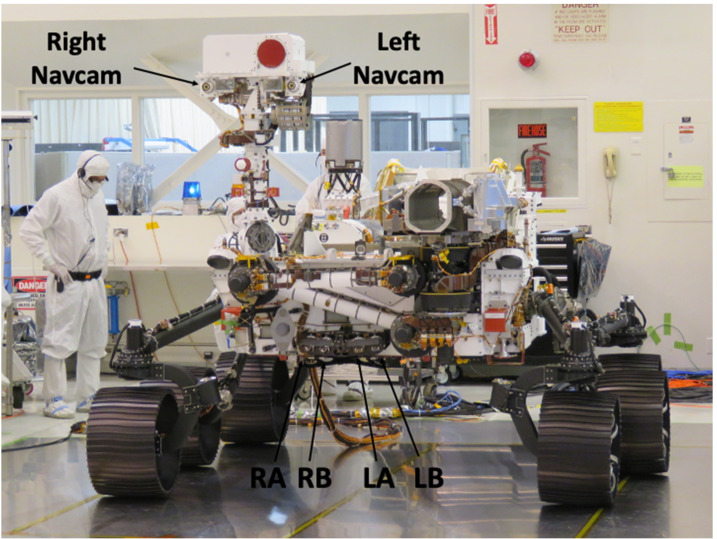
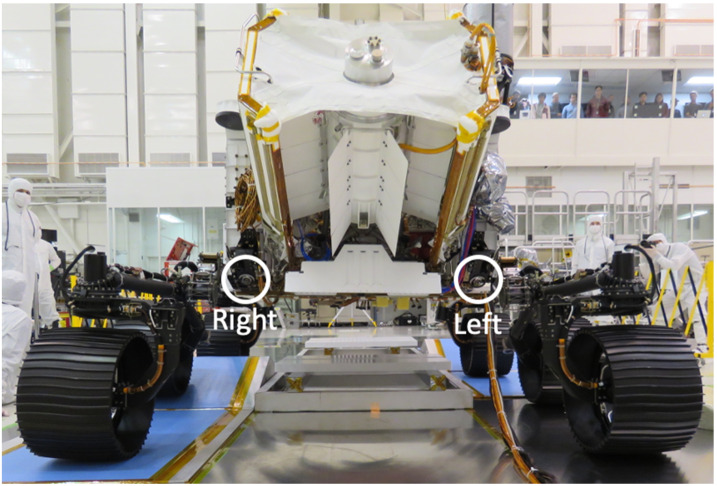
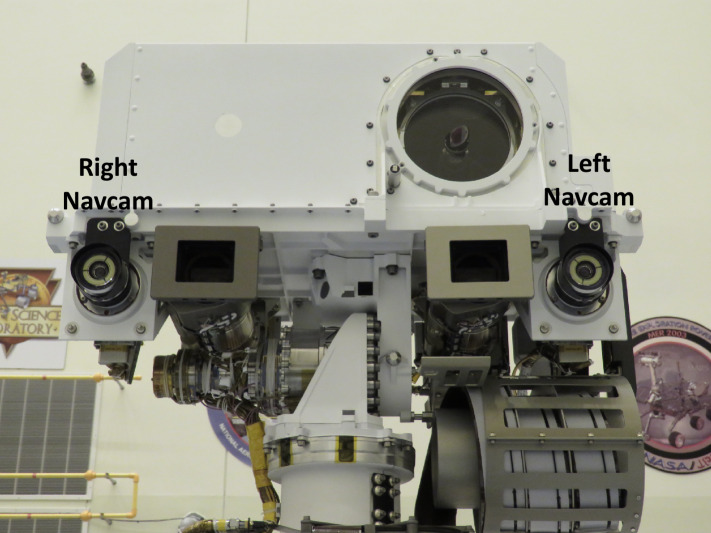
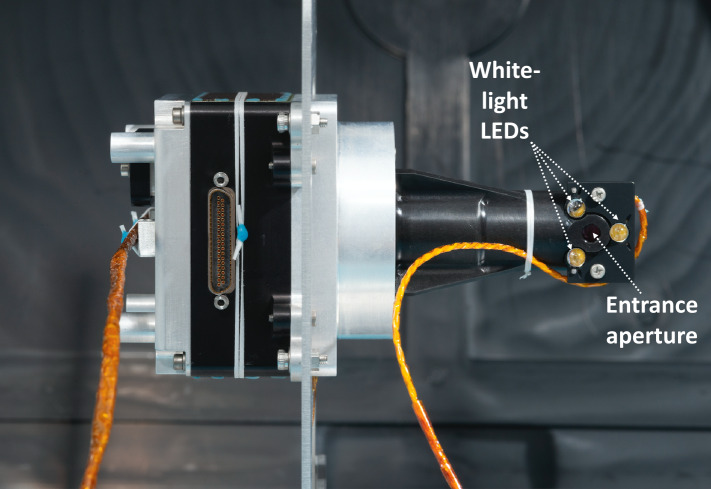
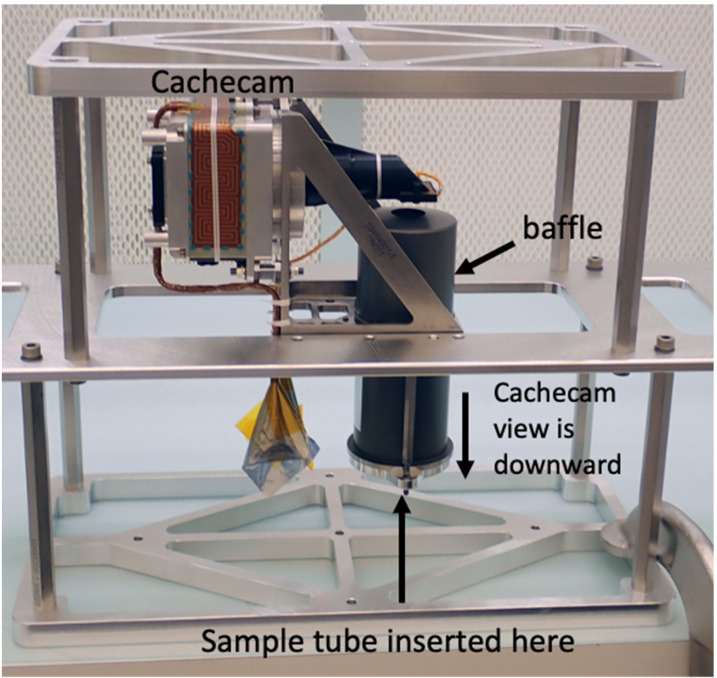
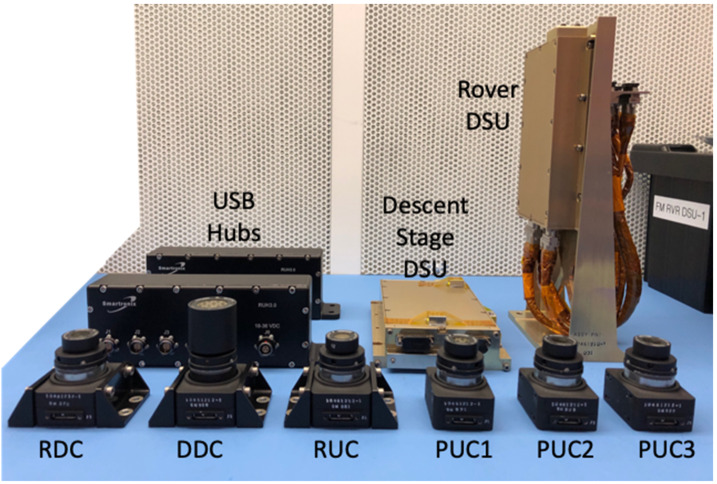
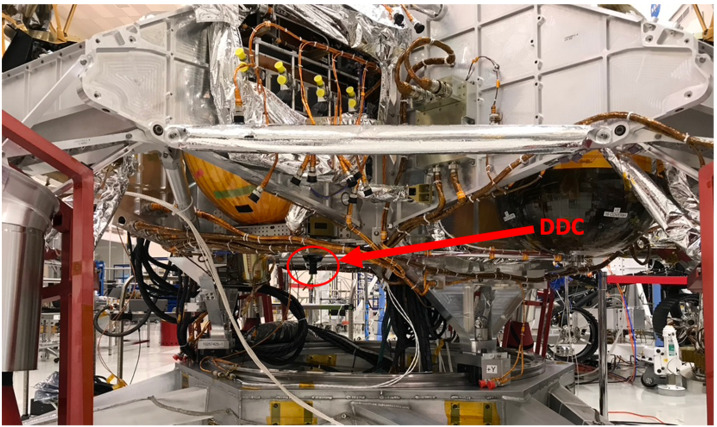
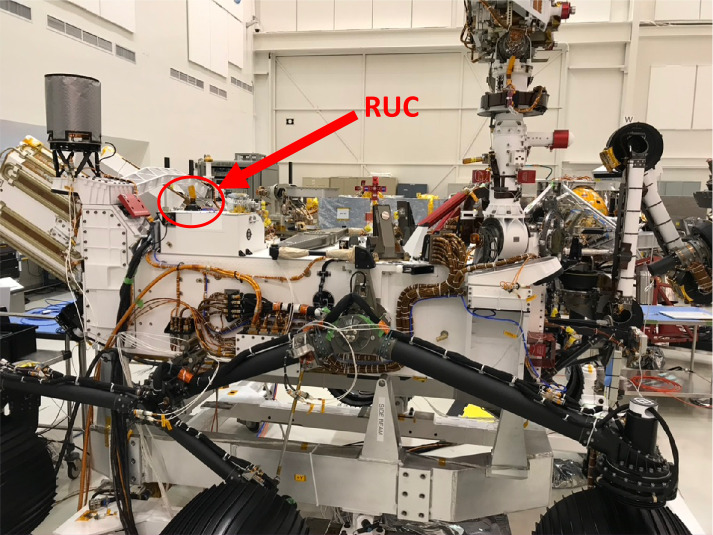
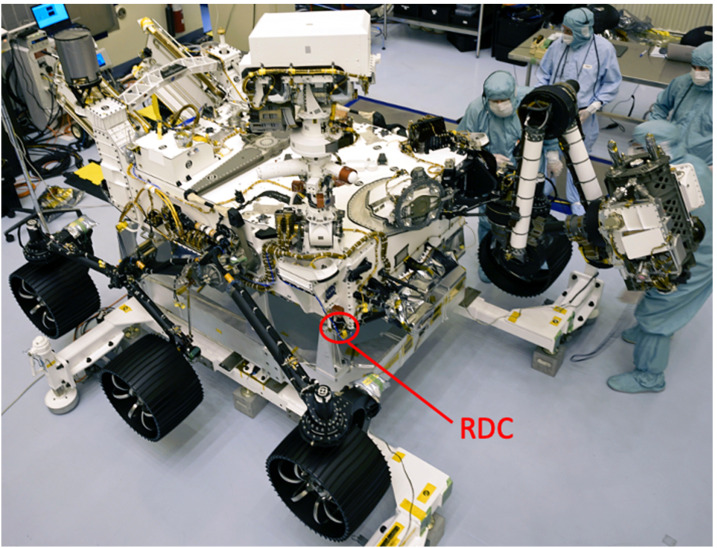
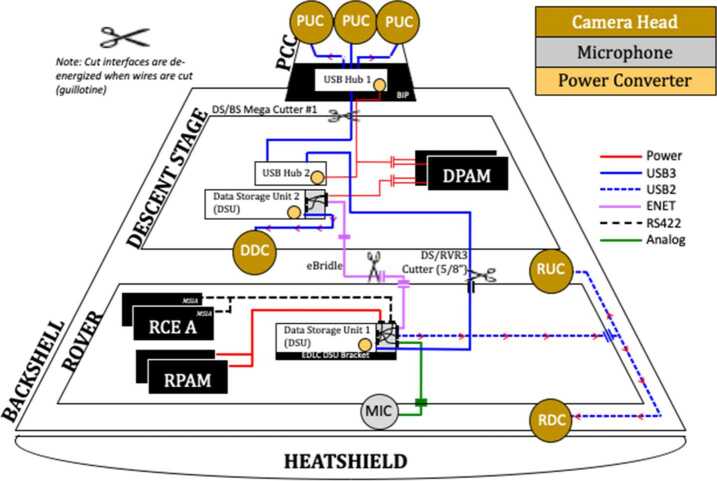
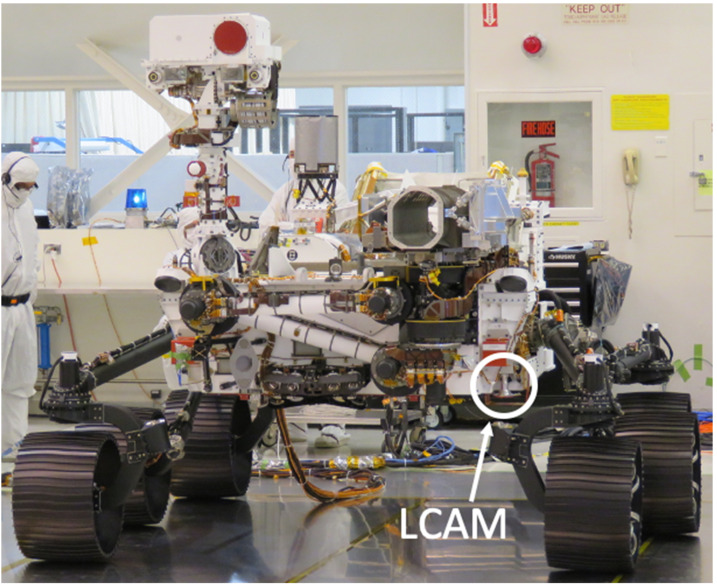
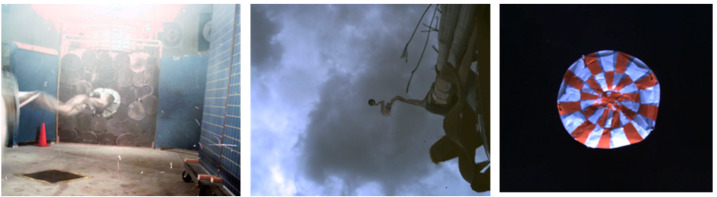
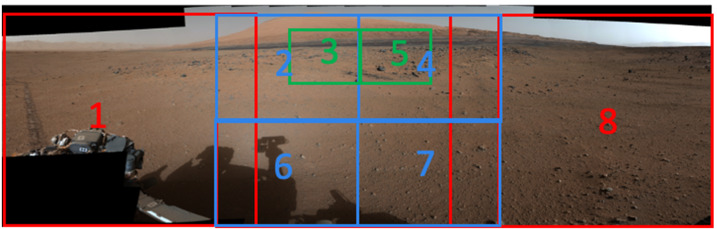
The Mars 2020 rover is equipped with a next-generation engineering camera imaging system that represents an upgrade over previous Mars rover missions. These upgrades will improve the operational capabilities of the rover with an emphasis on drive planning, robotic arm operation, instrument operations, sample caching activities, and documentation of key events during entry, descent, and landing (EDL). There are a total of 16 cameras in the engineering imaging system, including 9 cameras for surface operations and 7 cameras for EDL documentation. There are 3 types of cameras designed for surface operations: Navigation cameras (Navcams, quantity 2), Hazard Avoidance Cameras (Hazcams, quantity 6), and Cachecam (quantity 1). The Navcams will acquire color stereo images of the surface with a field of view at 0.33 mrad/pixel. The Hazcams will acquire color stereo images of the surface with a at 0.46 mrad/pixel. The Cachecam, a new camera type, will acquire images of Martian material inside the sample tubes during caching operations at a spatial scale of 12.5 microns/pixel. There are 5 types of EDL documentation cameras: The Parachute Uplook Cameras (PUCs, quantity 3), the Descent stage Downlook Camera (DDC, quantity 1), the Rover Uplook Camera (RUC, quantity 1), the Rover Descent Camera (RDC, quantity 1), and the Lander Vision System (LVS) Camera (LCAM, quantity 1). The PUCs are mounted on the parachute support structure and will acquire video of the parachute deployment event as part of a system to characterize parachute performance. The DDC is attached to the descent stage and pointed downward, it will characterize vehicle dynamics by capturing video of the rover as it descends from the skycrane. The rover-mounted RUC, attached to the rover and looking upward, will capture similar video of the skycrane from the vantage point of the rover and will also acquire video of the descent stage flyaway event. The RDC, attached to the rover and looking downward, will document plume dynamics by imaging the Martian surface before, during, and after rover touchdown. The LCAM, mounted to the bottom of the rover chassis and pointed downward, will acquire FOV images during the parachute descent phase of EDL as input to an onboard map localization by the Lander Vision System (LVS). The rover also carries a microphone, mounted externally on the rover chassis, to capture acoustic signatures during and after EDL. The rover launched from Earth on July 30th, 2020, and touchdown on Mars is scheduled for February 18th, 2021.
“火星2020”探测器配备了下一代工程相机成像系统,相比之前的火星探测器任务有了升级。这些升级将提升探测器的运行能力,重点在于行驶规划、机械臂操作、仪器操作、样本缓存活动以及对进入、下降和着陆(EDL)期间关键事件的记录。工程成像系统共有16台相机,其中9台用于表面操作,7台用于EDL记录。用于表面操作的相机有3种类型:导航相机(Navcams,数量为2)、避险相机(Hazcams,数量为6)和样本缓存相机(Cachecam,数量为1)。导航相机将以0.33毫弧度/像素的视场获取表面的彩色立体图像。避险相机将以0.46毫弧度/像素的视场获取表面的彩色立体图像。样本缓存相机是一种新型相机,将在缓存操作期间以12.5微米/像素的空间尺度获取样本管内火星物质的图像。用于EDL记录的相机有5种类型:降落伞仰视相机(PUCs,数量为3)、下降阶段俯视相机(DDC,数量为1)、探测器仰视相机(RUC,数量为1)、探测器下降相机(RDC,数量为1)和着陆器视觉系统(LVS)相机(LCAM,数量为1)。降落伞仰视相机安装在降落伞支撑结构上,将获取降落伞展开事件的视频,作为表征降落伞性能系统的一部分。下降阶段俯视相机连接在下降阶段并向下指向,它将通过捕捉探测器从空中吊车下降时的视频来表征车辆动力学。安装在探测器上的探测器仰视相机连接在探测器上并向上看将从探测器的有利位置捕捉空中吊车的类似视频,还将获取下降阶段飞离事件的视频。探测器下降相机连接在探测器上并向下看,将通过对探测器着陆前、着陆期间和着陆后火星表面成像来记录羽流动力学。着陆器视觉系统相机安装在探测器底盘底部并向下指向,将在EDL的降落伞下降阶段获取视场图像,作为着陆器视觉系统(LVS)进行机载地图定位的输入。探测器还携带一个麦克风,外部安装在探测器底盘上,用于捕捉EDL期间及之后的声学特征。该探测器于2020年7月30日从地球发射,计划于2021年2月18日在火星着陆。