Wang Faan, Zhuang Weichao, Yin Guodong, Liu Shuaipeng, Liu Ying, Dong Haoxuan
School of Mechanical Engineering, Southeast University, 2 Southeast University Road, Jiangning District, Nanjing 211189, China.
Sensors (Basel). 2021 Mar 14;21(6):2048. doi: 10.3390/s21062048.
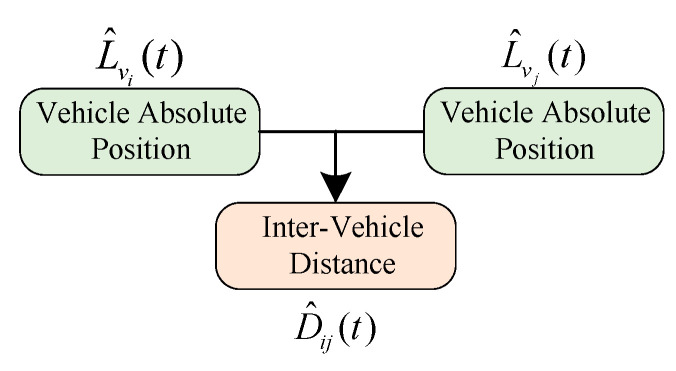
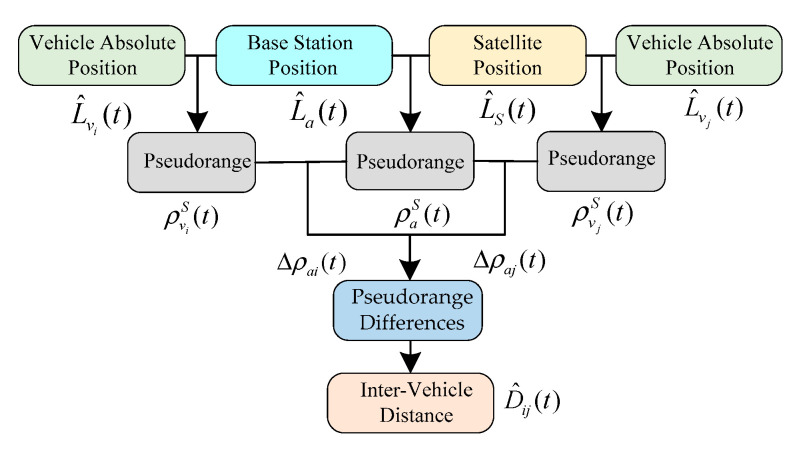
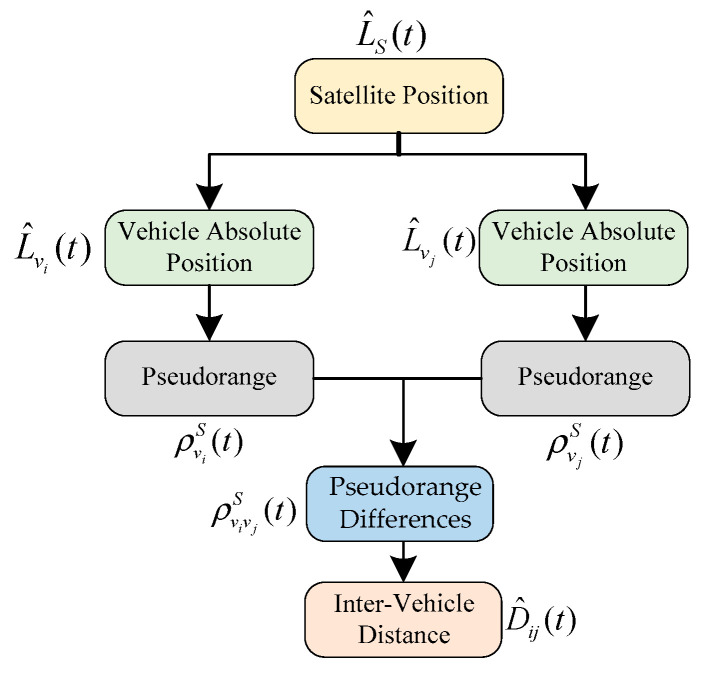
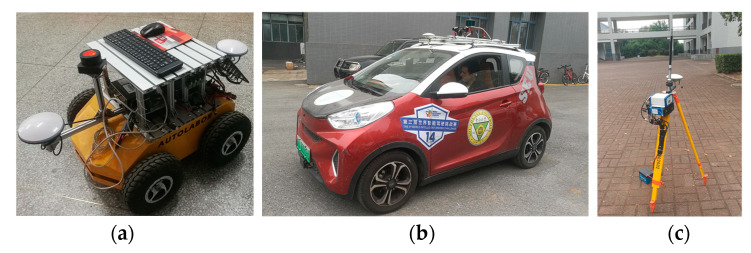
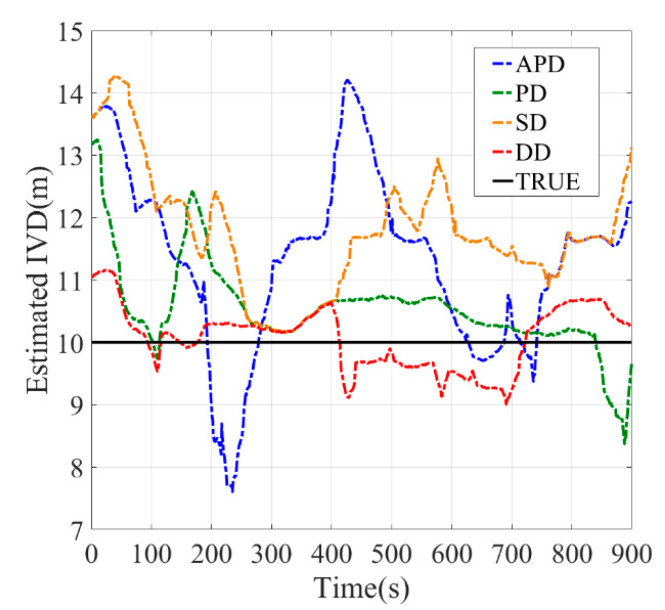
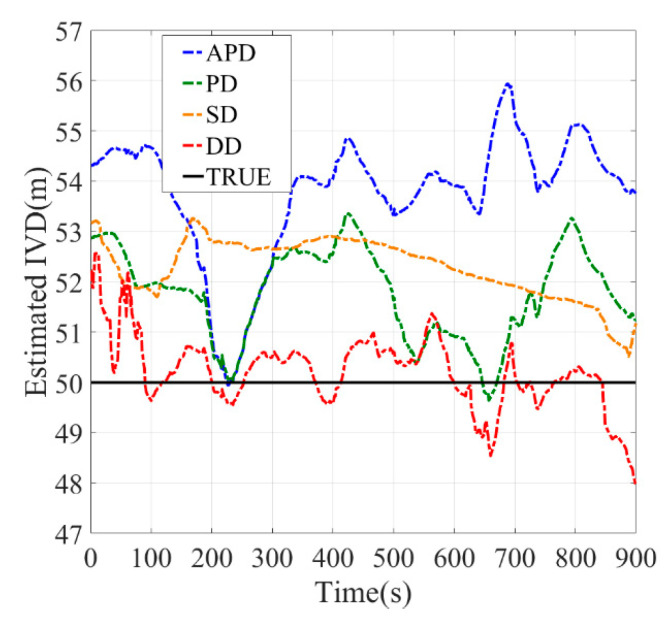
Precise localization is critical to safety for connected and automated vehicles (CAV). The global navigation satellite system is the most common vehicle positioning method and has been widely studied to improve localization accuracy. In addition to single-vehicle localization, some recently developed CAV applications require accurate measurement of the inter-vehicle distance (IVD). Thus, this paper proposes a cooperative localization framework that shares the absolute position or pseudorange by using V2X communication devices to estimate the IVD. Four IVD estimation methods are presented: Absolute Position Differencing (APD), Pseudorange Differencing (PD), Single Differencing (SD) and Double Differencing (DD). Several static and dynamic experiments are conducted to evaluate and compare their measurement accuracy. The results show that the proposed methods may have different performances under different conditions. The DD shows the superior performance among the four methods if the uncorrelated errors are small or negligible (static experiment or dynamic experiment with open-sky conditions). When multi-path errors emerge due to the blocked GPS signal, the PD method using the original pseudorange is more effective because the uncorrelated errors cannot be eliminated by the differential technique.
精确的定位对于联网和自动驾驶车辆(CAV)的安全性至关重要。全球导航卫星系统是最常见的车辆定位方法,并且已经进行了广泛的研究以提高定位精度。除了单车定位之外,一些最近开发的CAV应用还需要精确测量车辆间距离(IVD)。因此,本文提出了一种协作定位框架,该框架通过使用车对万物(V2X)通信设备共享绝对位置或伪距来估计IVD。提出了四种IVD估计方法:绝对位置差分(APD)、伪距差分(PD)、单差分(SD)和双差分(DD)。进行了几个静态和动态实验来评估和比较它们的测量精度。结果表明,所提出的方法在不同条件下可能具有不同的性能。如果不相关误差较小或可忽略不计(静态实验或开阔天空条件下的动态实验),DD在这四种方法中表现出优越的性能。当由于GPS信号受阻而出现多径误差时,使用原始伪距的PD方法更有效,因为差分技术无法消除不相关误差。