Parreira Raquel, Özelçi Ece, Sakar Mahmut Selman
School of Engineering, Ecole Polytechnique Fédérale de Lausanne, Lausanne, Switzerland.
Front Robot AI. 2021 Mar 18;8:649765. doi: 10.3389/frobt.2021.649765. eCollection 2021.
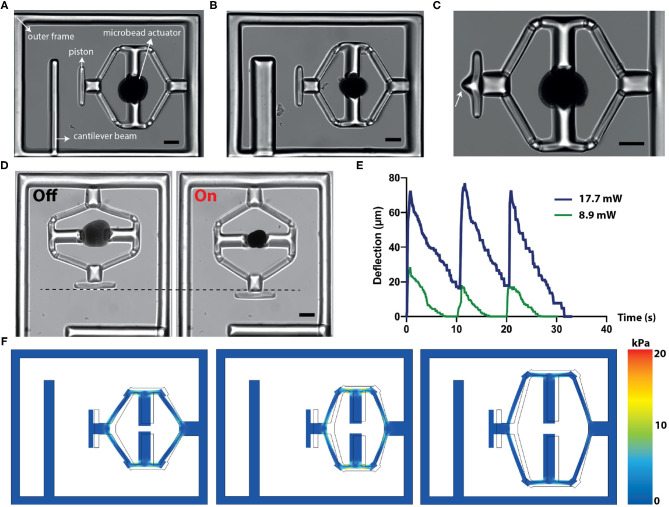
This paper presents the design, fabrication, and operation of a soft robotic compression device that is remotely powered by laser illumination. We combined the rapid and wireless response of hybrid nanomaterials with state-of-the-art microengineering techniques to develop machinery that can apply physiologically relevant mechanical loading. The passive hydrogel structures that constitute the compliant skeleton of the machines were fabricated using single-step polymerization process and directly incorporated around the actuators without further assembly steps. Experimentally validated computational models guided the design of the compression mechanism. We incorporated a cantilever beam to the prototype for life-time monitoring of mechanical properties of cell clusters on optical microscopes. The mechanical and biochemical compatibility of the chosen materials with living cells together with the on-site manufacturing process enable seamless interfacing of soft robotic devices with biological specimen.
本文介绍了一种由激光照射远程供电的软机器人压缩装置的设计、制造和操作。我们将混合纳米材料的快速无线响应与最先进的微工程技术相结合,开发出能够施加生理相关机械负荷的机械装置。构成机器柔顺骨架的无源水凝胶结构采用单步聚合工艺制造,并直接整合在致动器周围,无需进一步组装步骤。经过实验验证的计算模型指导了压缩机制的设计。我们在原型中加入了悬臂梁,用于在光学显微镜上对细胞簇的机械性能进行长期监测。所选材料与活细胞的机械和生化兼容性以及现场制造工艺,使得软机器人设备能够与生物样本无缝对接。