Department of Mechanical Engineering, ETH Zurich, CH-8092 Zurich, Switzerland.
Institute of Mechanical Engineering, Ecole Polytechnique Fédérale de Lausanne, CH-1015 Lausanne, Switzerland.
Sci Adv. 2019 Jan 18;5(1):eaau1532. doi: 10.1126/sciadv.aau1532. eCollection 2019 Jan.
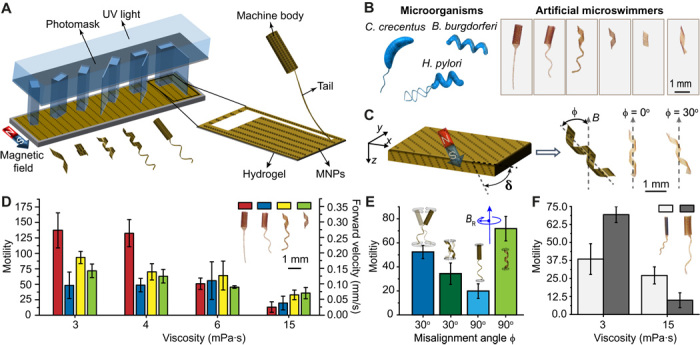
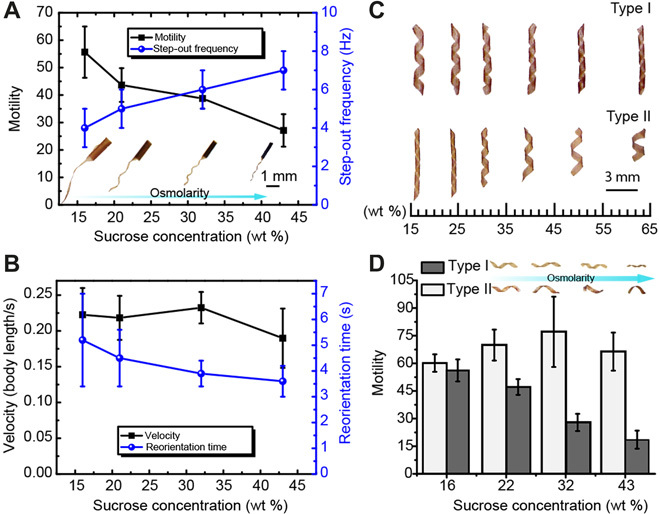
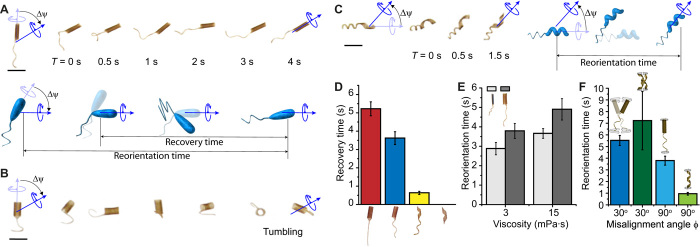
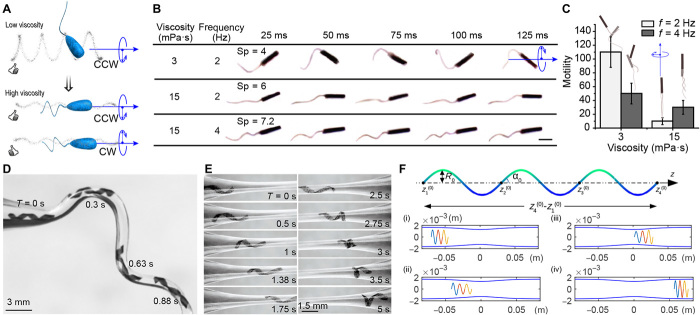
Bacteria can exploit mechanics to display remarkable plasticity in response to locally changing physical and chemical conditions. Compliant structures play a notable role in their taxis behavior, specifically for navigation inside complex and structured environments. Bioinspired mechanisms with rationally designed architectures capable of large, nonlinear deformation present opportunities for introducing autonomy into engineered small-scale devices. This work analyzes the effect of hydrodynamic forces and rheology of local surroundings on swimming at low Reynolds number, identifies the challenges and benefits of using elastohydrodynamic coupling in locomotion, and further develops a suite of machinery for building untethered microrobots with self-regulated mobility. We demonstrate that coupling the structural and magnetic properties of artificial microswimmers with the dynamic properties of the fluid leads to adaptive locomotion in the absence of on-board sensors.
细菌可以利用力学在局部物理化学条件变化时表现出显著的可塑性。顺应结构在它们的趋性行为中起着显著的作用,特别是在导航复杂和结构化的环境中。具有合理设计的架构的仿生机制能够实现大的非线性变形,为引入自主性到工程化的小型设备中提供了机会。这项工作分析了在低雷诺数下游泳时的流体动力和局部环境流变学的影响,确定了在运动中使用弹性流体动力耦合的挑战和好处,并进一步开发了一套用于构建具有自我调节机动性的无束缚微机器人的机械装置。我们证明,将人工微游泳者的结构和磁性能与流体的动态特性相结合,可在没有机载传感器的情况下实现自适应运动。