De Santis Dalia
Department of Robotics, Brain and Cognitive Sciences, Center for Human Technologies, Istituto Italiano di Tecnologia, Genova, Italy.
Front Neurorobot. 2021 Apr 21;15:662181. doi: 10.3389/fnbot.2021.662181. eCollection 2021.
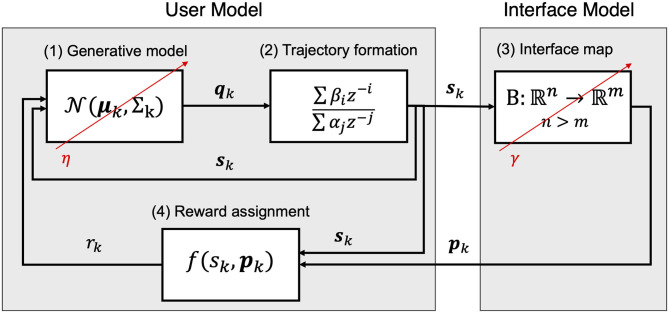
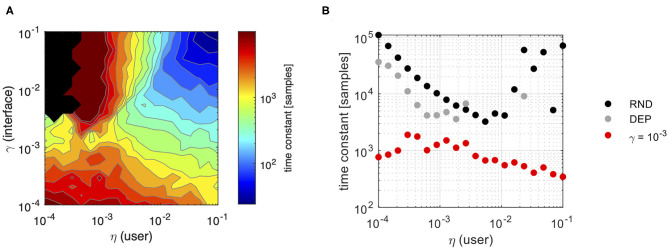
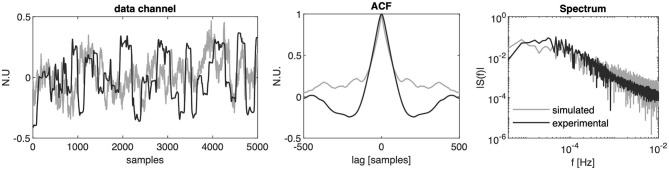
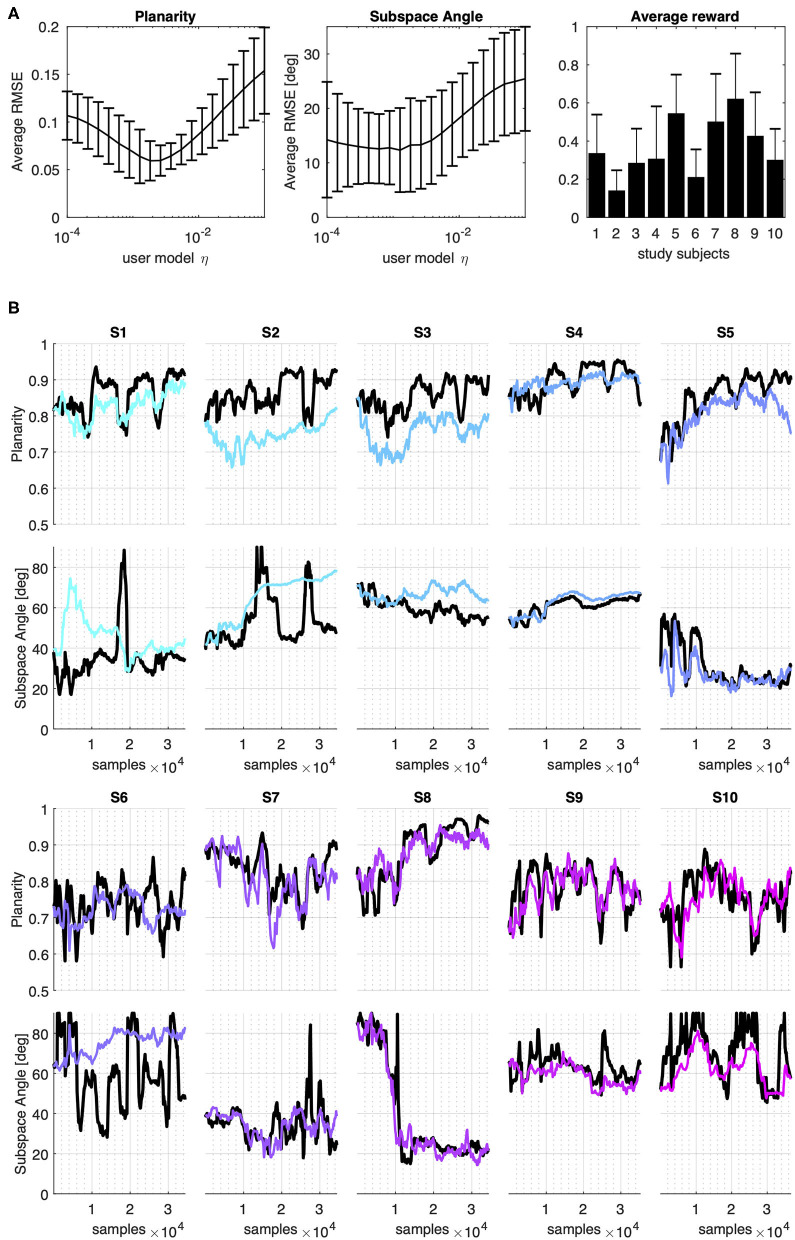
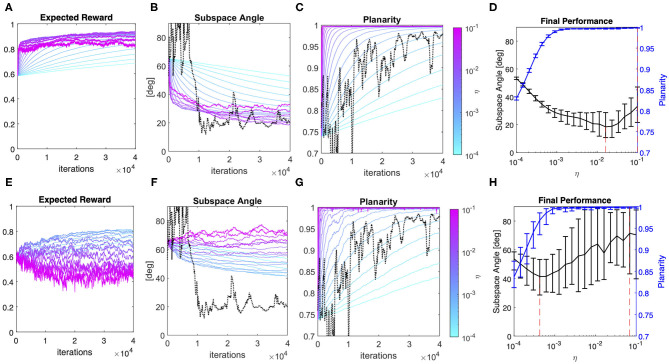
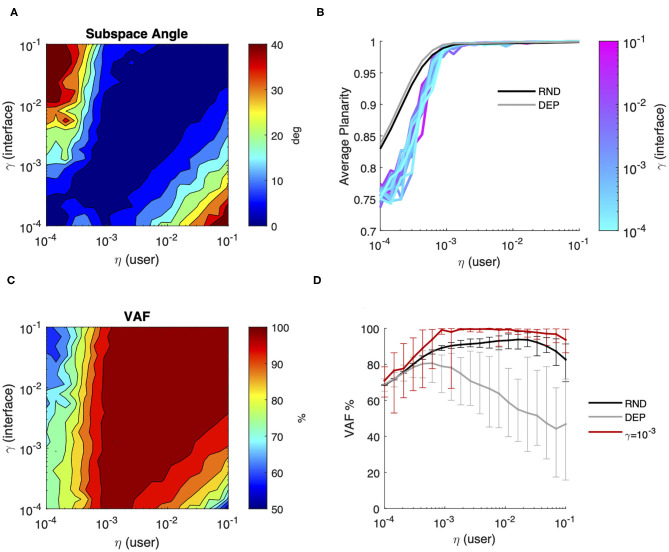
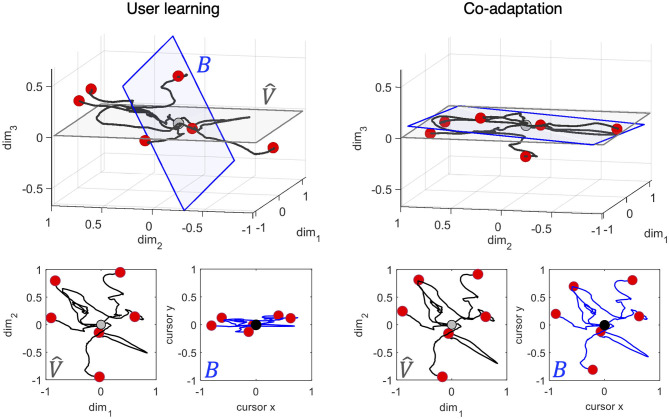
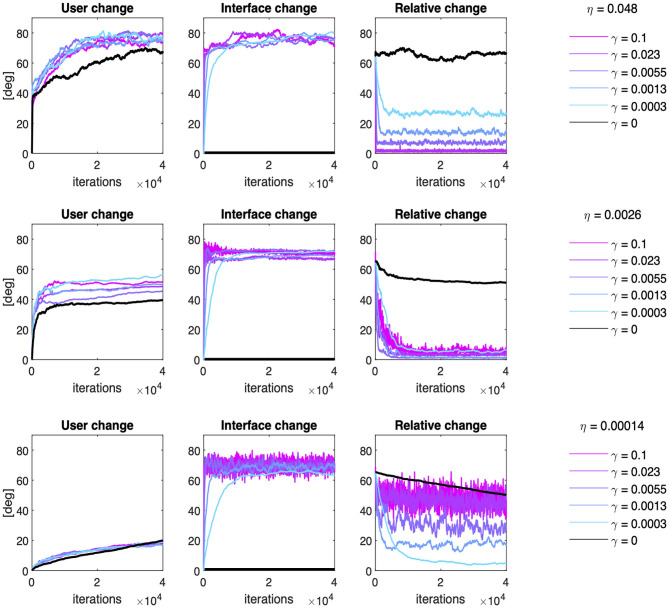
The operation of a human-machine interface is increasingly often referred to as a two-learners problem, where both the human and the interface independently adapt their behavior based on shared information to improve joint performance over a specific task. Drawing inspiration from the field of body-machine interfaces, we take a different perspective and propose a framework for studying co-adaptation in scenarios where the evolution of the interface is dependent on the users' behavior and that do not require task goals to be explicitly defined. Our mathematical description of co-adaptation is built upon the assumption that the interface and the user agents co-adapt toward maximizing the interaction efficiency rather than optimizing task performance. This work describes a mathematical framework for body-machine interfaces where a naïve user interacts with an adaptive interface. The interface, modeled as a linear map from a space with high dimension (the user input) to a lower dimensional feedback, acts as an adaptive "tool" whose goal is to minimize transmission loss following an unsupervised learning procedure and has no knowledge of the task being performed by the user. The user is modeled as a non-stationary multivariate Gaussian generative process that produces a sequence of actions that is either statistically independent or correlated. Dependent data is used to model the output of an action selection module concerned with achieving some unknown goal dictated by the task. The framework assumes that in parallel to this explicit objective, the user is implicitly learning a suitable but not necessarily optimal way to interact with the interface. Implicit learning is modeled as use-dependent learning modulated by a reward-based mechanism acting on the generative distribution. Through simulation, the work quantifies how the system evolves as a function of the learning time scales when a user learns to operate a static vs. an adaptive interface. We show that this novel framework can be directly exploited to readily simulate a variety of interaction scenarios, to facilitate the exploration of the parameters that lead to optimal learning dynamics of the joint system, and to provide an empirical proof for the superiority of human-machine co-adaptation over user adaptation.
人机界面的操作越来越常被视为一个双学习者问题,即人和界面都基于共享信息独立调整自身行为,以提高在特定任务上的联合表现。从人体-机器界面领域获取灵感,我们采用了不同的视角,并提出了一个框架,用于研究在界面演变依赖于用户行为且无需明确界定任务目标的场景中的共同适应。我们对共同适应的数学描述基于这样一个假设,即界面和用户代理共同适应以最大化交互效率,而非优化任务表现。这项工作描述了一个人体-机器界面的数学框架,其中一个新手用户与一个自适应界面进行交互。该界面被建模为从高维空间(用户输入)到低维反馈的线性映射,充当一个自适应“工具”,其目标是在无监督学习过程后最小化传输损耗,并且对用户正在执行的任务一无所知。用户被建模为一个非平稳多变量高斯生成过程,该过程产生一系列动作,这些动作要么在统计上独立,要么相关。相关数据用于对一个动作选择模块的输出进行建模,该模块关注实现由任务规定的某个未知目标。该框架假设,与这个明确目标并行,用户在隐式学习一种合适但不一定最优的与界面交互的方式。隐式学习被建模为基于作用于生成分布的奖励机制调制的使用依赖学习。通过模拟,这项工作量化了当用户学习操作静态界面与自适应界面时,系统如何作为学习时间尺度的函数而演变。我们表明,这个新颖的框架可以直接用于轻松模拟各种交互场景,便于探索导致联合系统最优学习动态的参数,并为人机共同适应优于用户适应提供实证证明。