Song Yichen, Li Aiping, Tu Hongkui, Chen Kai, Li Chenchen
College of Computer, National University of Defence Technology, Changsha, China.
Front Neurorobot. 2021 May 11;15:674428. doi: 10.3389/fnbot.2021.674428. eCollection 2021.
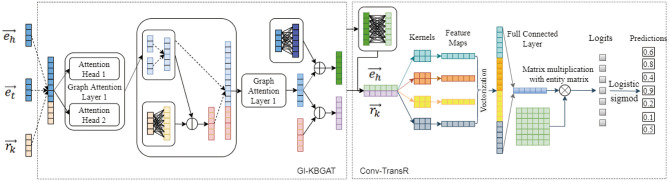
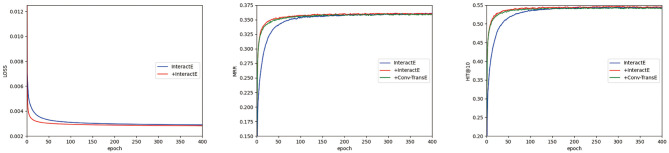
With the rapid development of artificial intelligence, Cybernetics, and other High-tech subject technology, robots have been made and used in increasing fields. And studies on robots have attracted growing research interests from different communities. The knowledge graph can act as the brain of a robot and provide intelligence, to support the interaction between the robot and the human beings. Although the large-scale knowledge graphs contain a large amount of information, they are still incomplete compared with real-world knowledge. Most existing methods for knowledge graph completion focus on entity representation learning. However, the importance of relation representation learning is ignored, as well as the cross-interaction between entities and relations. In this paper, we propose an encoder-decoder model which embeds the interaction between entities and relations, and adds a gate mechanism to control the attention mechanism. Experimental results show that our method achieves better link prediction performance than state-of-the-art embedding models on two benchmark datasets, WN18RR and FB15k-237.
随着人工智能、控制论等高科技学科技术的飞速发展,机器人已被制造出来并应用于越来越多的领域。对机器人的研究也吸引了不同领域越来越多的研究兴趣。知识图谱可以充当机器人的大脑并提供智能,以支持机器人与人类之间的交互。尽管大规模知识图谱包含大量信息,但与现实世界的知识相比,它们仍然不完整。大多数现有的知识图谱补全方法都集中在实体表示学习上。然而,关系表示学习的重要性以及实体与关系之间的交叉交互被忽视了。在本文中,我们提出了一种编码器-解码器模型,该模型嵌入实体与关系之间的交互,并添加了一个门控机制来控制注意力机制。实验结果表明,在两个基准数据集WN18RR和FB15k-237上,我们的方法比现有最先进的嵌入模型具有更好的链接预测性能。