Department of Mechanical Engineering, Koszalin University of Technology, 75453 Koszalin, Poland.
Institute of Applied Mechanics, Poznan University of Technology, ul. Jana Pawła II 24, 60965 Poznań, Poland.
Sensors (Basel). 2021 May 14;21(10):3432. doi: 10.3390/s21103432.
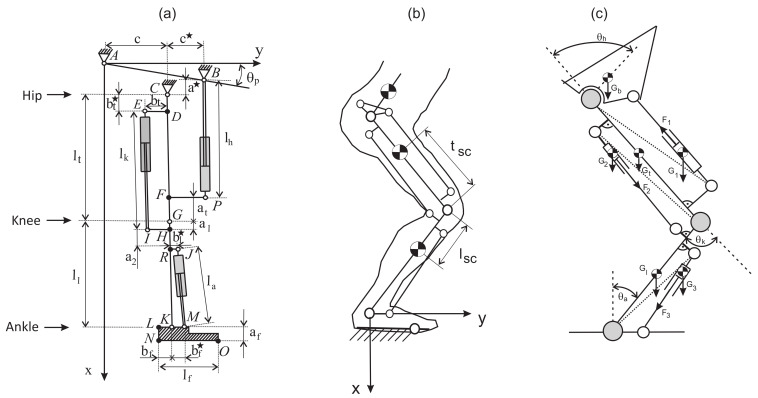
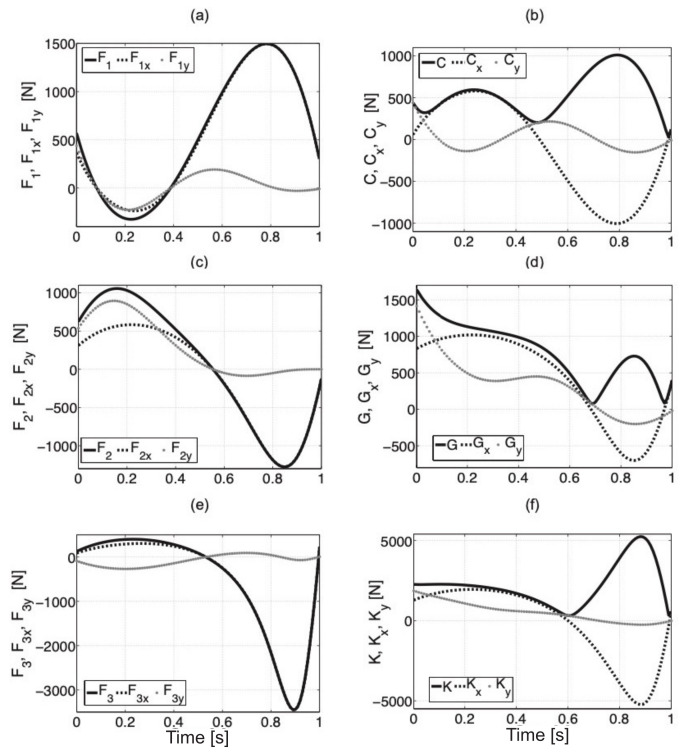
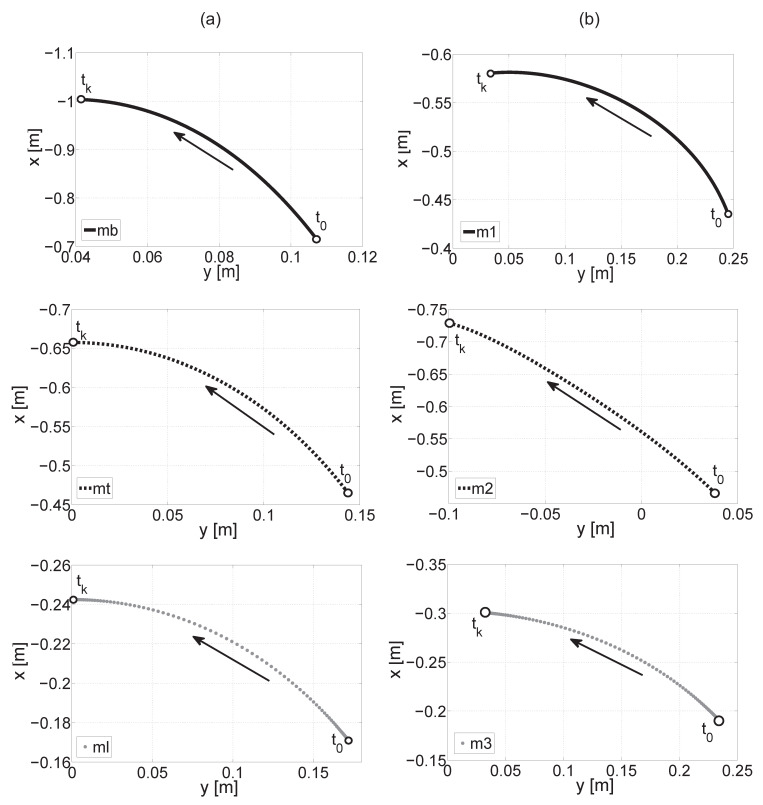
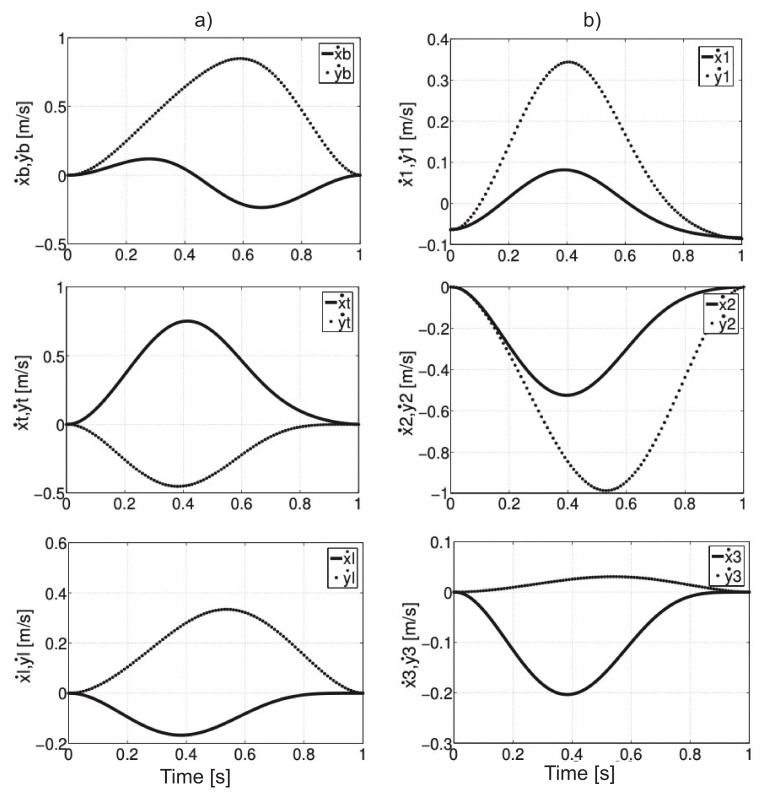
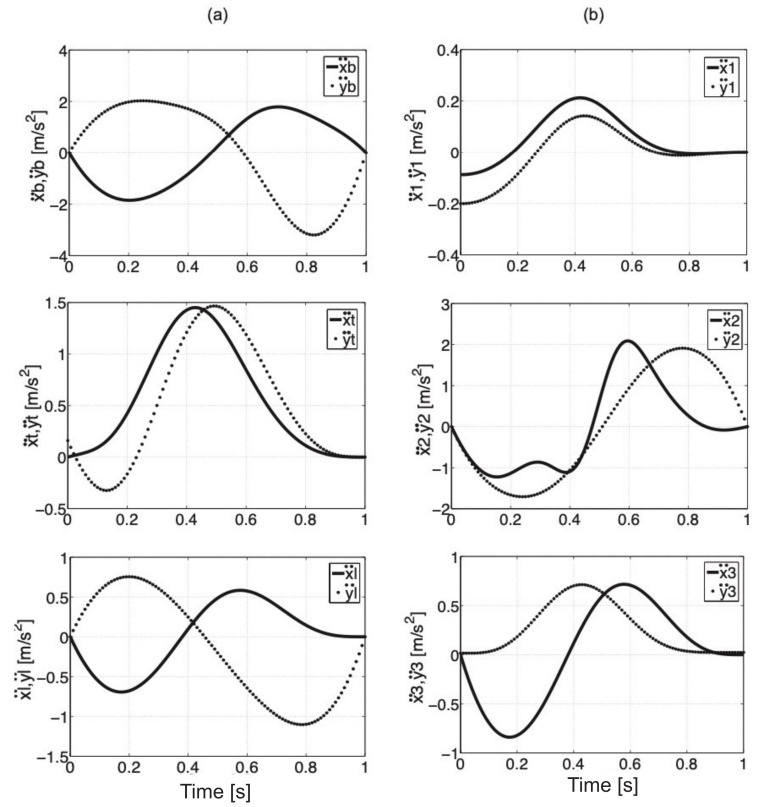
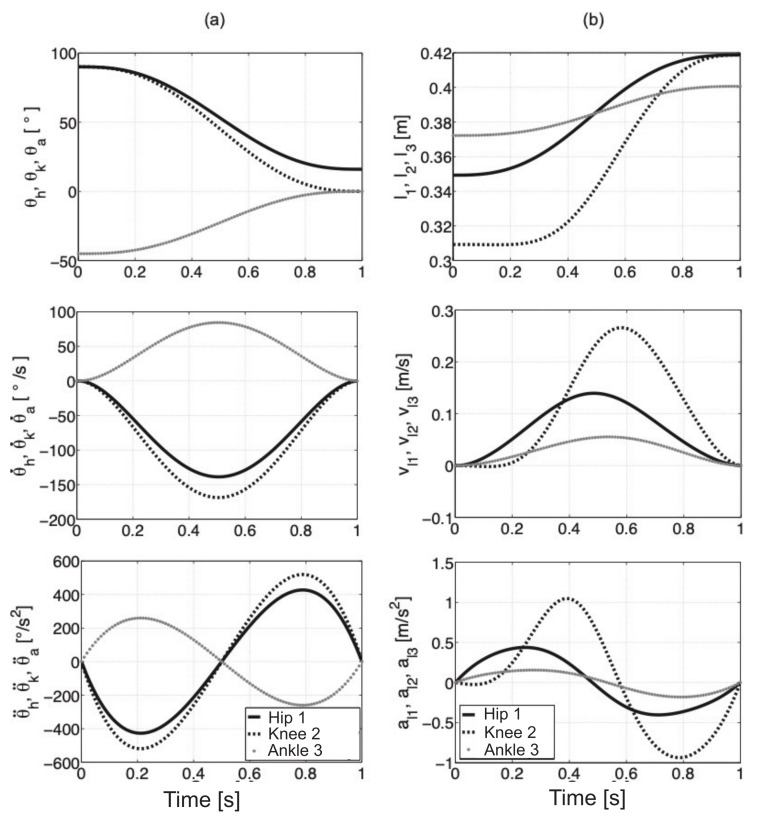
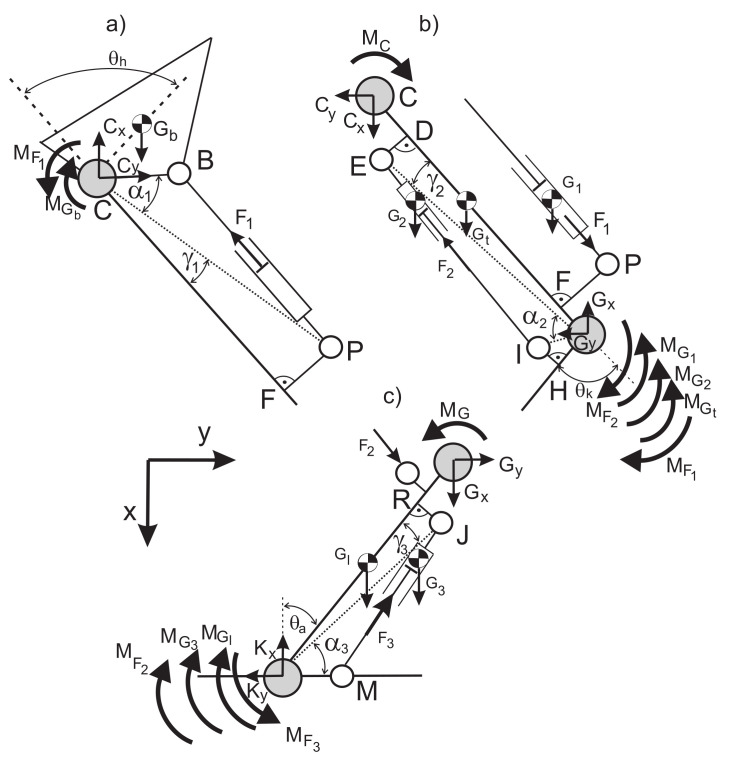
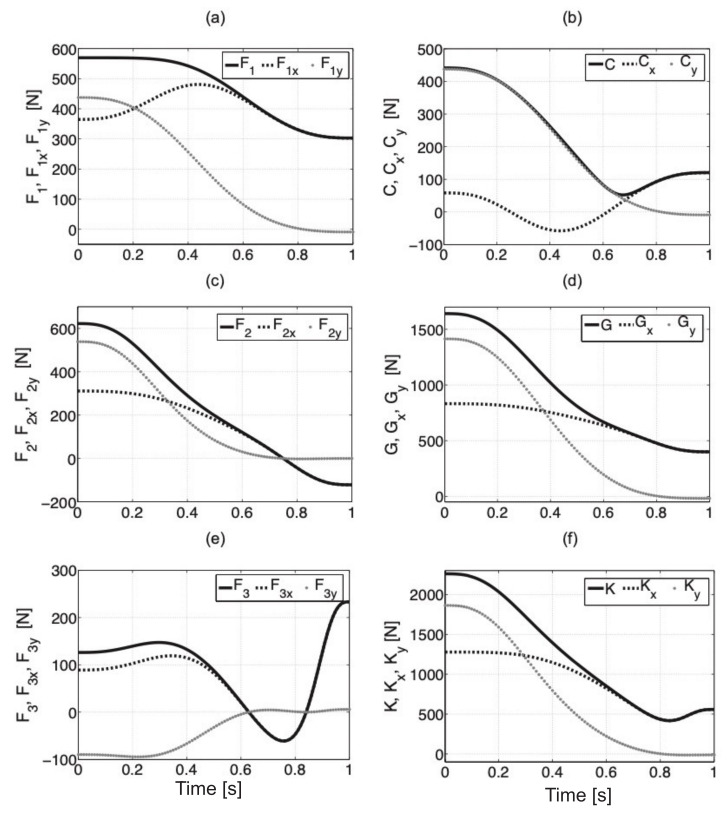
Exoskeletons are the mechanical systems whose operation is carried out in close cooperation with the human body. In this paper, the authors describe a mathematical model of the hydraulic exoskeleton of a lower limb. The coordinates of characteristic points of the exoskeleton in the sagittal plane as a function of user height are presented. The mathematical models, kinematics, and kinetics equations were determined. The masses of the actuators and their dimensions were selected based on catalog data. The force distribution in the wearable system during the squat is shown. The proposed models allowed us to determine the trajectory of individual points of the exoskeleton and to determine the forces in hydraulic cylinders that are necessary to perform a specific displacement. The simulation results show that the joint moments depend linearly on actuator forces. The dynamics equations of the wearable system are non-linear. The inertia of the system depends on the junction variables and it proves that there are dynamic couplings between the individual axes of the exoskeleton.
外骨骼是与人体密切合作运行的机械系统。本文作者描述了一种下肢液压外骨骼的数学模型。给出了外骨骼在矢状面内特征点随使用者身高变化的坐标。确定了数学模型、运动学和动力学方程。根据目录数据选择了执行器的质量及其尺寸。显示了在深蹲过程中外穿式系统中的力分布。所提出的模型允许我们确定外骨骼各个点的轨迹,并确定在执行特定位移时需要在液压缸中施加的力。模拟结果表明,关节力矩与执行器的力呈线性关系。可穿戴系统的动力学方程是非线性的。系统的惯性取决于关节变量,这证明了外骨骼的各个轴之间存在动态耦合。