Department of Mechanical Engineering, Koszalin University of Technology, 75453 Koszalin, Poland.
Institute of Health Science, Slupsk Pomeranian University, 76200 Slupsk, Poland.
Sensors (Basel). 2020 Oct 27;20(21):6116. doi: 10.3390/s20216116.
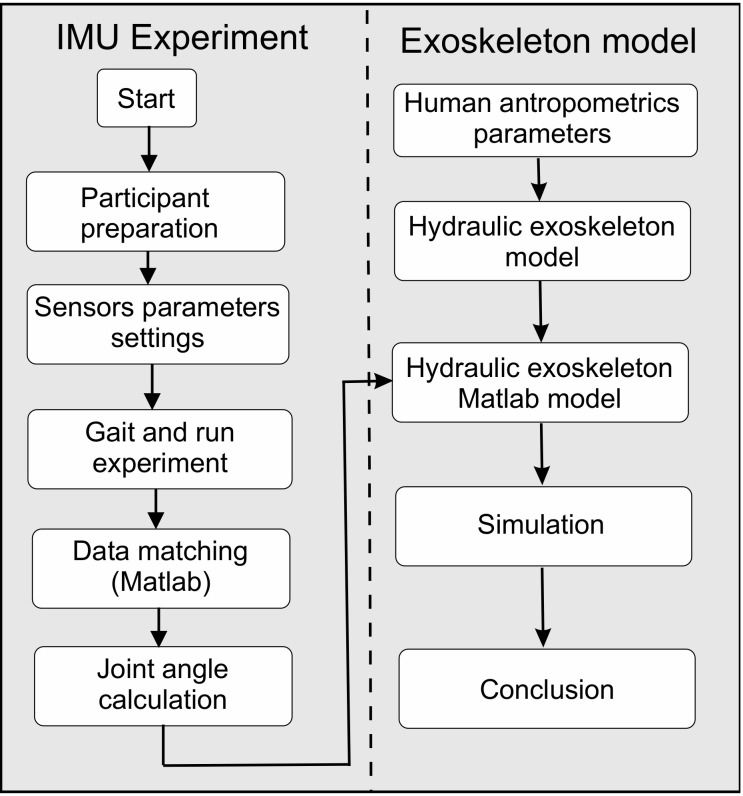
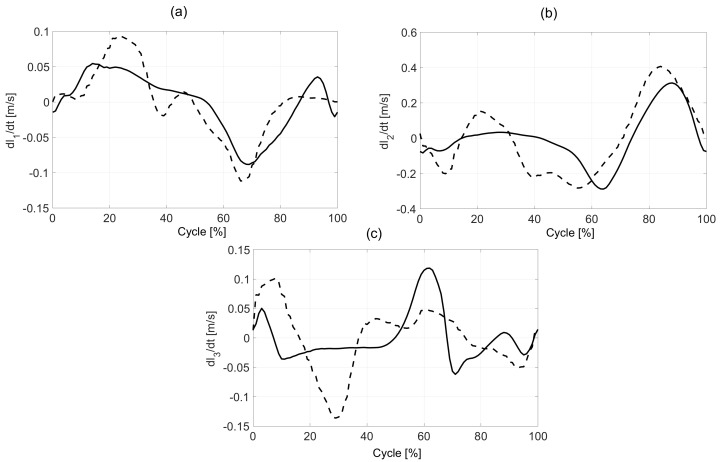
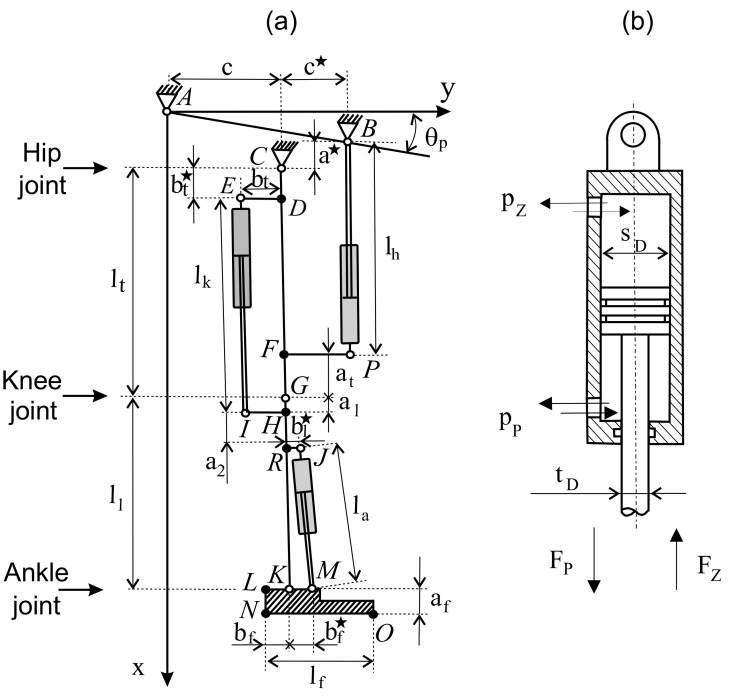
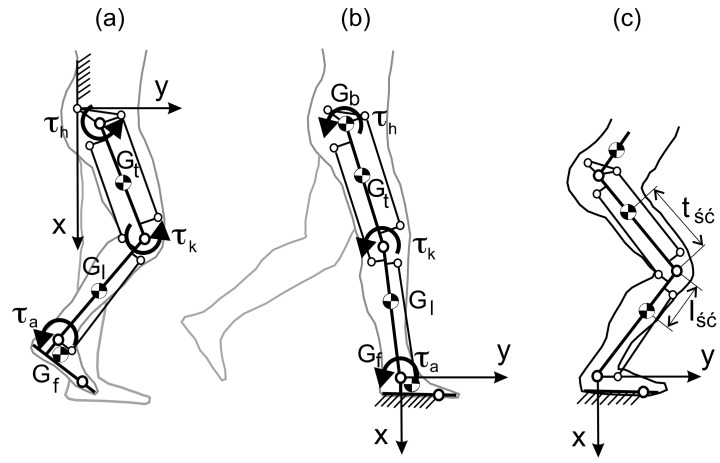
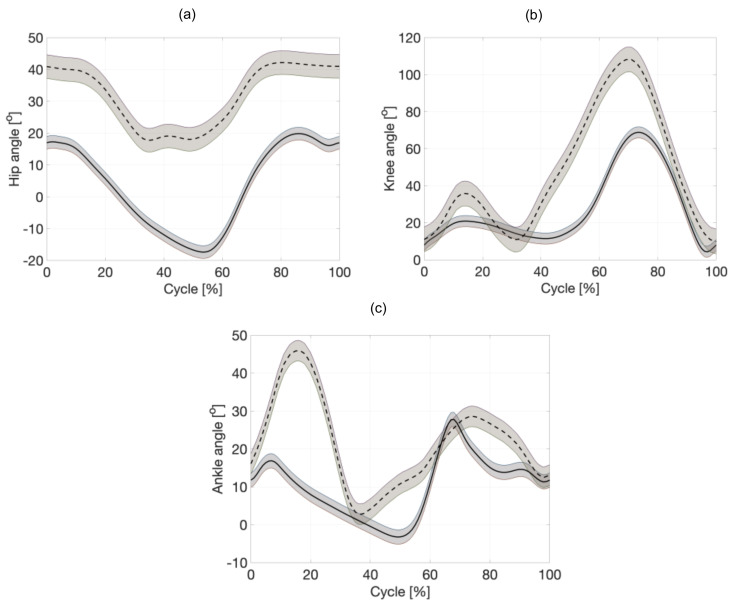
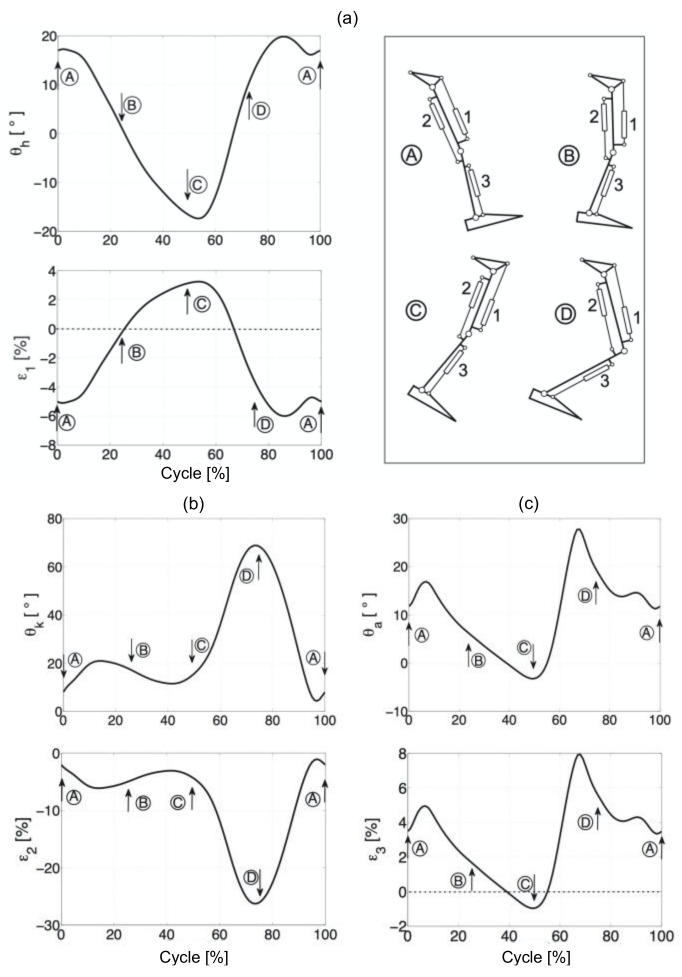
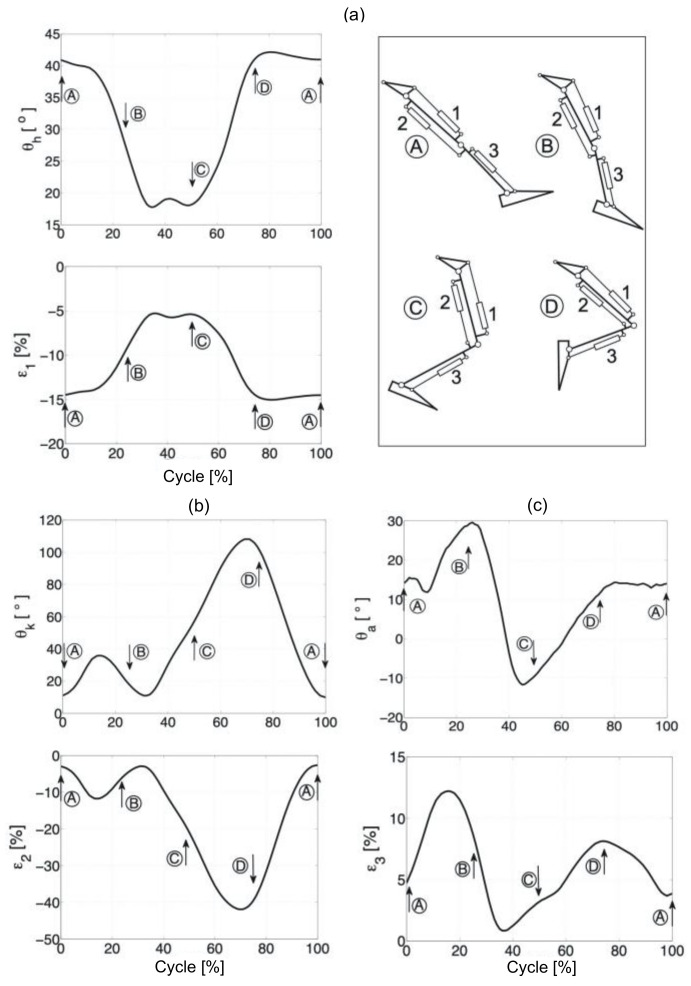
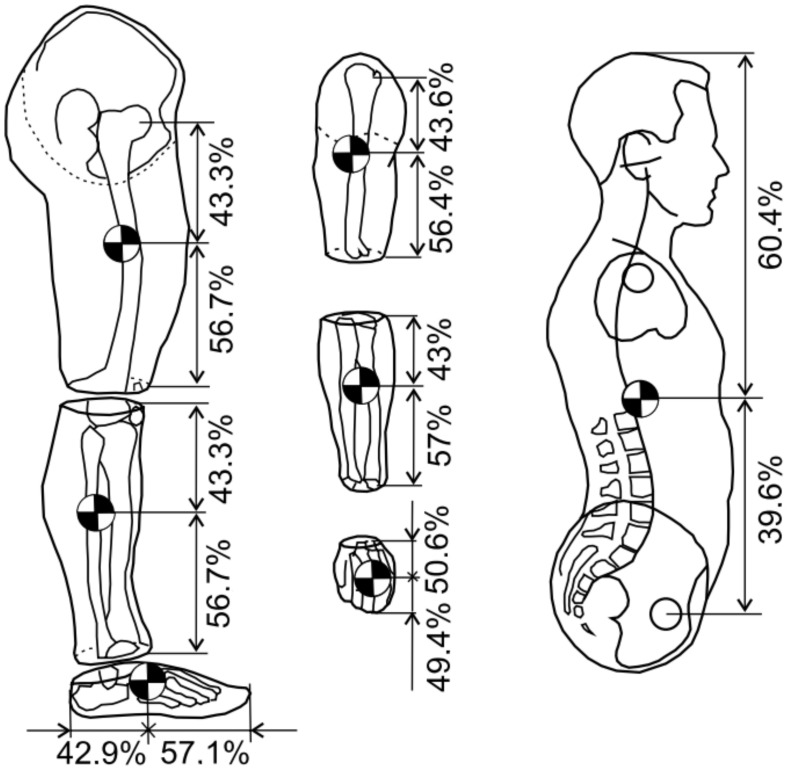
Although it is well-established that exoskeletons as robots attached to the extremities of the human body increase their strength, limited studies presented a computer and mathematical model of a human leg hydraulic exoskeleton based on anthropometric data. This study aimed to examine lower limb joint angles during walking and running by using Inertial Measurement Units. The geometry and kinematic parameters were calculated. Twenty-six healthy adults participated in walking and running experiments. The geometric model of a human leg hydraulic exoskeleton was presented. Joint angle data acquired during experiments were used in the mathematical model. The position and velocity of exoskeleton actuators in each phase of movement were calculated using the MATLAB package (Matlab_R2017b, The MathWorks Company, Novi, MI, USA). The highest velocity of the knee actuator during walking and running was in the swing phase, 0.3 and 0.4 m/s, respectively. For the ankle and hip joints, the highest velocity of actuators occurred during the push-off phase. The results with 26 healthy subjects demonstrated that the system's compliance can be effectively adjusted while guiding the subjects walking in predefined trajectories. The developed mathematical model makes it possible to determine the position of lower limb segments and exoskeleton elements. The proposed model allows for calculating the position of the human leg and actuators' characteristic points.
虽然已经证实,附着在人体四肢上的外骨骼机器人可以增强力量,但有限的研究提出了一种基于人体测量数据的计算机和数学模型的人类腿部液压外骨骼。本研究旨在使用惯性测量单元(IMU)检查行走和跑步时下肢关节角度。计算了几何和运动学参数。26 名健康成年人参与了行走和跑步实验。提出了人类腿部液压外骨骼的几何模型。在实验中获得的关节角度数据被用于数学模型。使用 MATLAB 软件包(Matlab_R2017b,MathWorks 公司,Novi,MI,USA)计算了运动各阶段中外骨骼执行器的位置和速度。在行走和跑步过程中,膝关节执行器的最高速度分别为 0.3 和 0.4m/s。对于踝关节和髋关节,执行器的最高速度发生在蹬离阶段。26 名健康受试者的结果表明,该系统的顺应性可以在引导受试者按照预定轨迹行走时进行有效调整。所开发的数学模型可以确定下肢节段和外骨骼元件的位置。所提出的模型允许计算人体腿部和执行器特征点的位置。