College of Communication and Information Engineering, Chongqing University of Posts and Telecommunications, Chongqing 400065, China.
Intelligent Terminal Key Laboratory of Sichuan Province, Yibin 644000, China.
Sensors (Basel). 2021 Jul 5;21(13):4604. doi: 10.3390/s21134604.
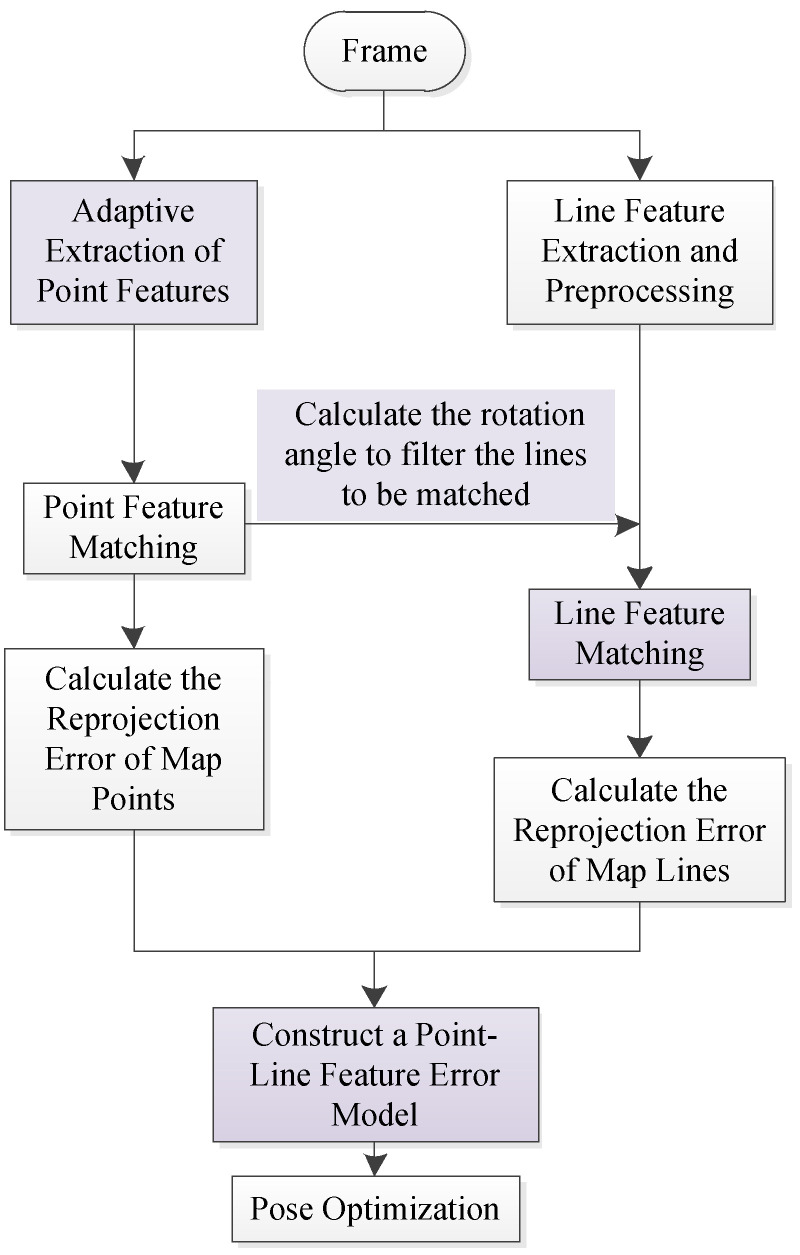
Traditional visual simultaneous localization and mapping (SLAM) systems rely on point features to estimate camera trajectories. However, feature-based systems are usually not robust in complex environments such as weak textures or obvious brightness changes. To solve this problem, we used more environmental structure information by introducing line segments features and designed a monocular visual SLAM system. This system combines points and line segments to effectively make up for the shortcomings of traditional positioning based only on point features. First, ORB algorithm based on local adaptive threshold was proposed. Subsequently, we not only optimized the extracted line features, but also added a screening step before the traditional descriptor matching to combine the point features matching results with the line features matching. Finally, the weighting idea was introduced. When constructing the optimized cost function, we allocated weights reasonably according to the richness and dispersion of features. Our evaluation on publicly available datasets demonstrated that the improved point-line feature method is competitive with the state-of-the-art methods. In addition, the trajectory graph significantly reduced drift and loss, which proves that our system increases the robustness of SLAM.
传统的视觉同步定位与建图 (SLAM) 系统依赖于点特征来估计相机轨迹。然而,基于特征的系统在弱纹理或明显亮度变化等复杂环境中通常不够稳健。为了解决这个问题,我们通过引入线段特征来利用更多的环境结构信息,并设计了一个单目视觉 SLAM 系统。该系统结合了点和线段,有效地弥补了传统仅基于点特征定位的缺点。首先,提出了基于局部自适应阈值的 ORB 算法。随后,我们不仅优化了提取的线段特征,而且在传统描述符匹配之前增加了一个筛选步骤,将点特征匹配结果与线段特征匹配相结合。最后,引入了加权思想。在构建优化的代价函数时,我们根据特征的丰富度和分散度合理分配权重。我们在公开可用数据集上的评估表明,改进的点-线特征方法具有竞争力,与最先进的方法相当。此外,轨迹图显著减少了漂移和丢失,这证明了我们的系统提高了 SLAM 的鲁棒性。