Kratchman Louis B, Bruns Trevor L, Abbott Jake J, Webster Robert J
Department of Mechanical Engineering, Vanderbilt University, Nashville, TN 37235 USA.
Department of Mechanical Engineering, University of Utah, Salt Lake City, UT 84112 USA.
IEEE Trans Robot. 2017 Feb;33(1):227-233. doi: 10.1109/TRO.2016.2623339. Epub 2016 Dec 1.
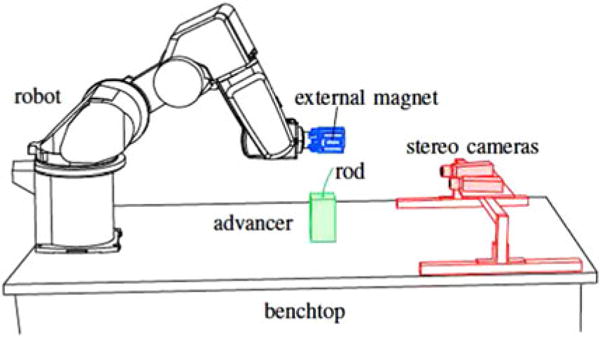
Magnet-tipped, elastic rods can be steered by an external magnetic field to perform surgical tasks. Such rods could be useful for a range of new medical applications because they do not require either pull wires or other bulky mechanisms that are problematic in small anatomical regions. However, current magnetic rod steering systems are large and expensive. Here, we describe a method to guide a rod using a robot-manipulated magnet located near a patient. We solve for rod deflections by combining permanent-magnet models with a Kirchhoff elastic rod model and use a resolved-rate approach to compute trajectories. Experiments show that three-dimensional trajectories can be executed accurately without feedback and that the system's redundancy can be exploited to avoid obstacles.
带有磁头的弹性杆可通过外部磁场进行操控以执行手术任务。此类杆对于一系列新的医学应用可能很有用,因为它们既不需要拉线,也不需要在小解剖区域中存在问题的其他笨重机构。然而,当前的磁杆操控系统体积大且昂贵。在此,我们描述一种使用位于患者附近的机器人操纵磁体来引导杆的方法。我们通过将永磁体模型与基尔霍夫弹性杆模型相结合来求解杆的挠度,并使用解耦速率方法来计算轨迹。实验表明,无需反馈即可精确执行三维轨迹操作,并且可以利用系统的冗余性来避开障碍物。