Fleming Aaron, Huang Stephanie, Buxton Elizabeth, Hodges Frank, Huang He Helen
Joint Department of Biomedical Engineering, North Carolina State University and University of North Carolina at Chapel Hill, Raleigh, North Carolina 27606, USA.
UNC Hospitals, Department of Rehabilitation Therapies, Chapel Hill, North Carolina 27514, USA.
Wearable Technol. 2021;2. doi: 10.1017/wtc.2021.2. Epub 2021 Apr 12.
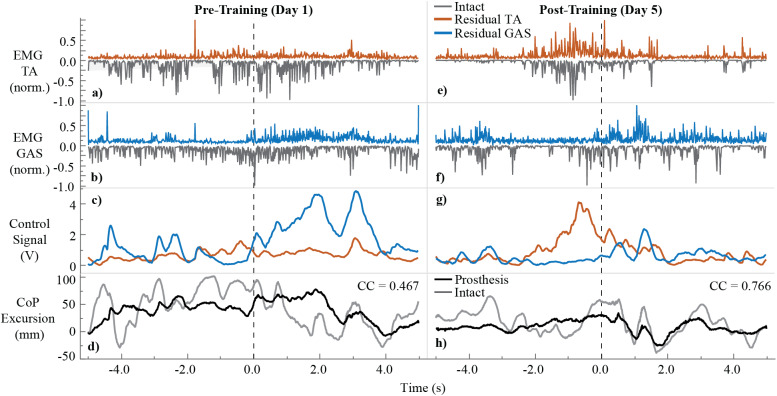
Despite the promise of powered lower limb prostheses, existing controllers do not assist many daily activities that require continuous control of prosthetic joints according to human states and environments. The objective of this case study was to investigate the feasibility of direct, continuous electromyographic (dEMG) control of a powered ankle prosthesis, combined with physical therapist-guided training, for improved standing postural control in an individual with transtibial amputation. Specifically, EMG signals of the residual antagonistic muscles (i.e. and were used to proportionally drive pneumatical artificial muscles to move a prosthetic ankle. Clinical-based activities were used in the training and evaluation protocol of the control paradigm. We quantified the EMG signals in the bilateral shank muscles as well as measures of postural control and stability. Compared to the participant's daily passive prosthesis, the dEMG-controlled ankle, combined with the training, yielded improved clinical balance scores and reduced compensation from intact joints. Cross-correlation coefficient of bilateral center of pressure excursions, a metric for quantifying standing postural control, increased to .83(±.07) when using dEMG ankle control ( .39(±.29)). We observed synchronized activation of homologous muscles, rapid improvement in performance on the first day of the training for load transfer tasks, and further improvement in performance across training days = This case study showed the feasibility of this dEMG control paradigm of a powered prosthetic ankle to assist postural control. This study lays the foundation for future study to extend these results through the inclusion of more participants and activities.
尽管动力下肢假肢前景广阔,但现有的控制器无法协助完成许多日常活动,这些活动需要根据人体状态和环境对假肢关节进行持续控制。本案例研究的目的是探讨对动力踝关节假肢进行直接、连续的肌电图(dEMG)控制,并结合物理治疗师指导的训练,以改善胫骨截肢患者站立姿势控制的可行性。具体而言,利用残余拮抗肌的肌电图信号(即 和 )来成比例地驱动气动人工肌肉,从而移动假肢踝关节。基于临床的活动被用于控制范式的训练和评估方案中。我们对双侧小腿肌肉中的肌电图信号以及姿势控制和稳定性指标进行了量化。与参与者日常使用的被动假肢相比,dEMG控制的踝关节结合训练,提高了临床平衡评分,并减少了健全关节的代偿。使用dEMG踝关节控制时,双侧压力中心偏移的互相关系数(一种量化站立姿势控制的指标)提高到了0.83(±0.07)(日常被动假肢时为0.39(±0.29))。我们观察到同源肌肉的同步激活、训练第一天负载转移任务的表现迅速改善以及训练期间表现的进一步提升( = )。本案例研究表明了这种动力假肢踝关节的dEMG控制范式有助于姿势控制的可行性。本研究为未来通过纳入更多参与者和活动来扩展这些结果的研究奠定了基础。