School of Information Engineering, East China Jiao Tong University, Shuanggang Dong Dajie 808, Nanchang 330013, China.
Sensors (Basel). 2021 Oct 28;21(21):7161. doi: 10.3390/s21217161.
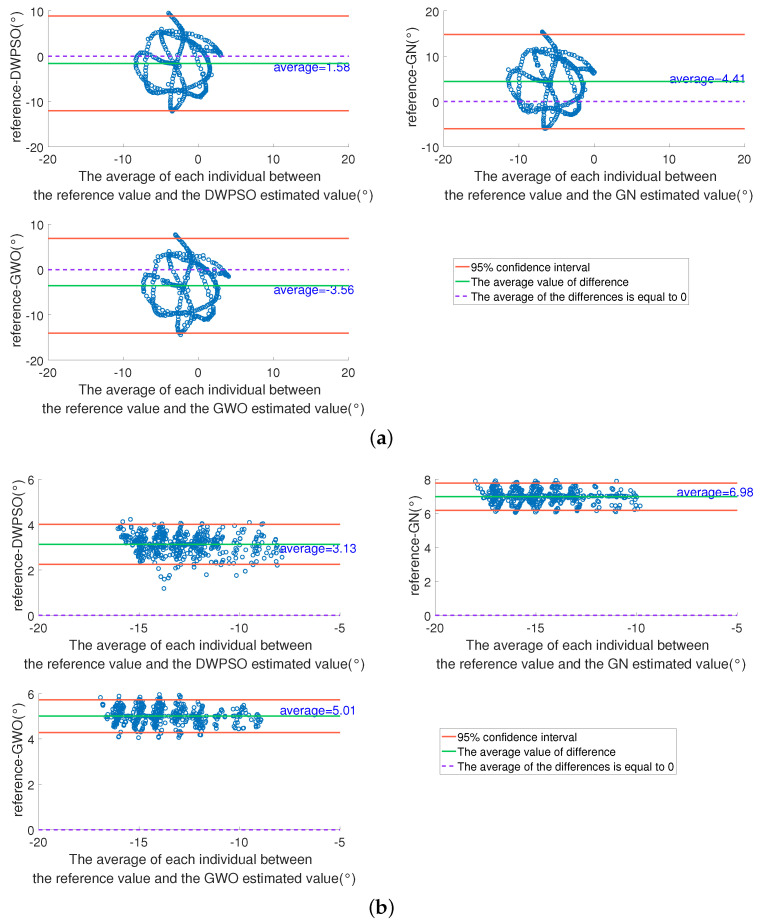
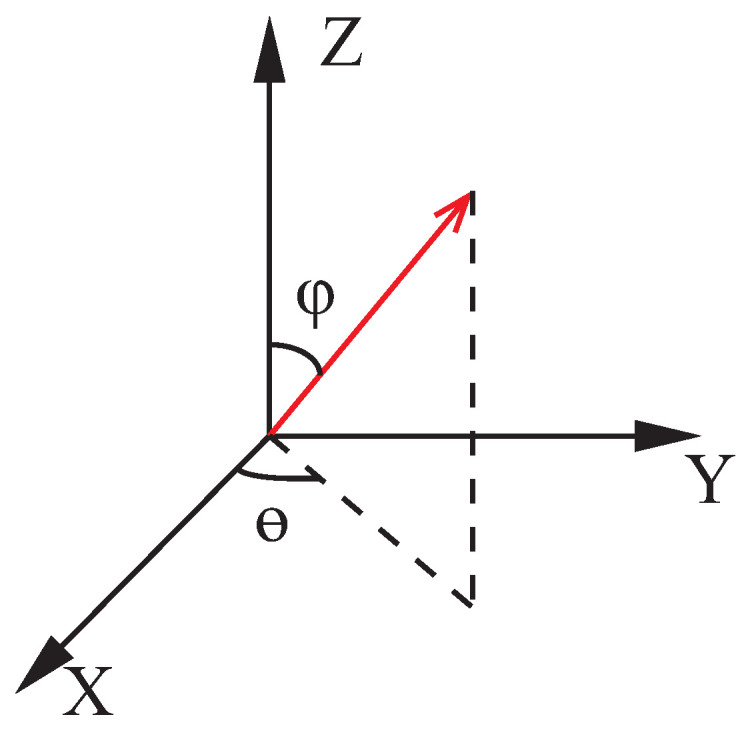
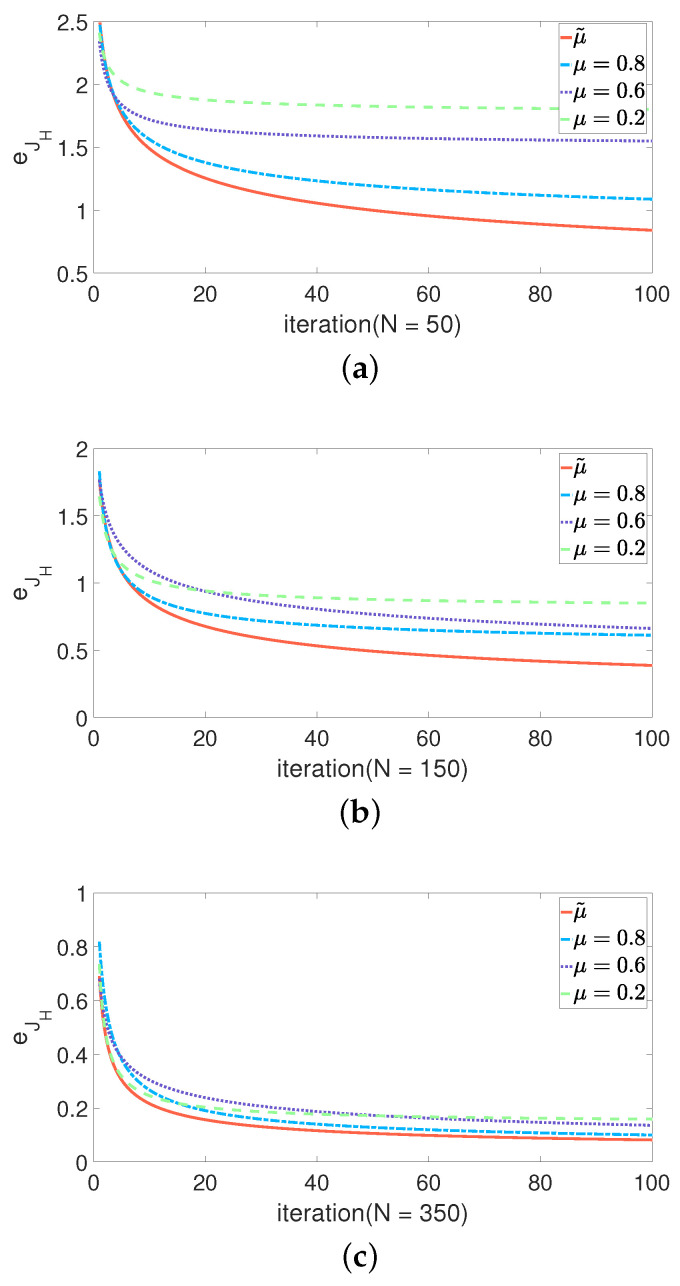
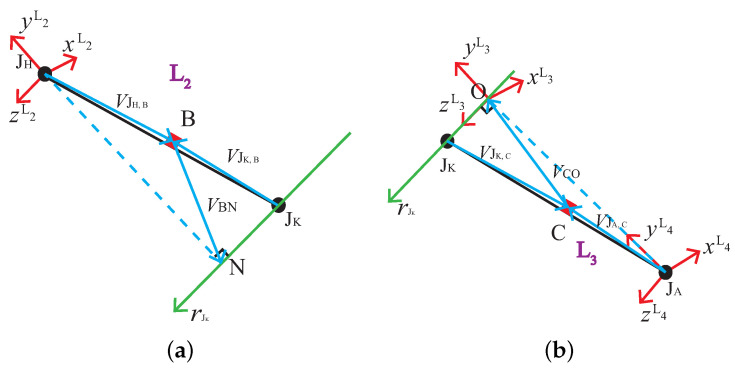
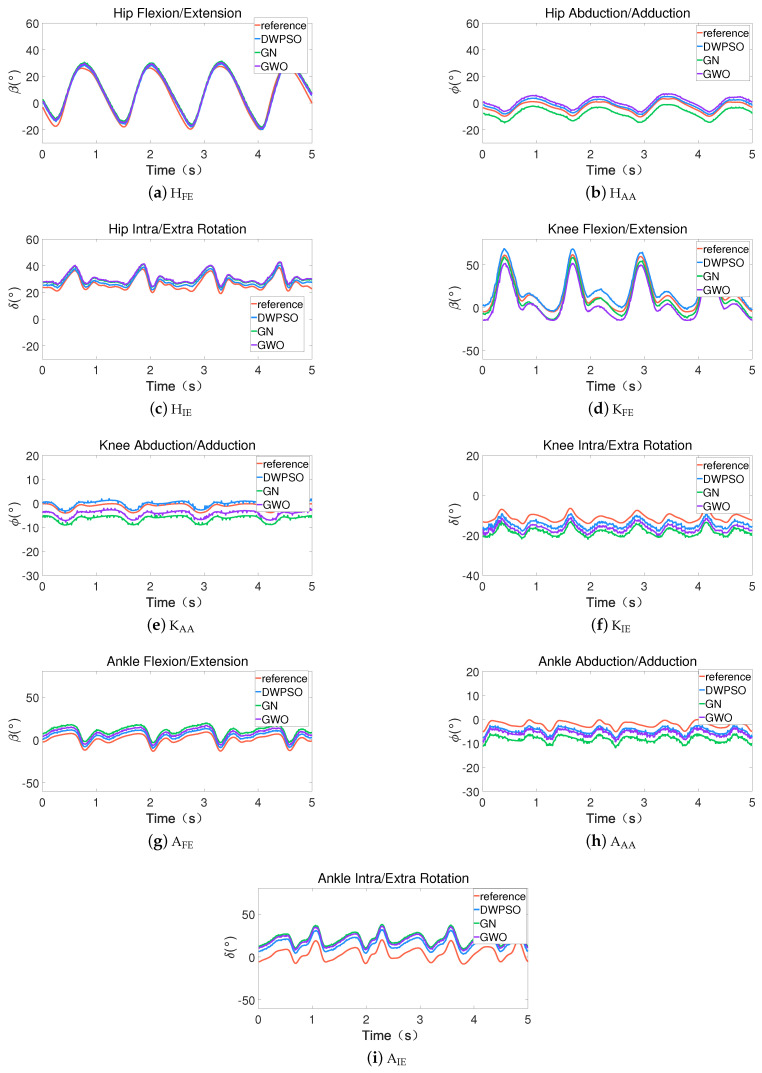
The position calibration of inertial measurement units (IMUs) is an important part of human motion capture, especially in wearable systems. In realistic applications, static calibration is quickly invalid during the motions for IMUs loosely mounted on the body. In this paper, we propose a dynamic position calibration algorithm for IMUs mounted on the waist, upper leg, lower leg, and foot based on joint constraints. To solve the problem of IMUs' position displacement, we introduce the Gauss-Newton (GN) method based on the Jacobian matrix, the dynamic weight particle swarm optimization (DWPSO), and the grey wolf optimizer (GWO) to realize IMUs' position calibration. Furthermore, we establish the coordinate system of human lower limbs to estimate each joint angle and use the fusion algorithm in the field of quaternions to improve the attitude calibration performance of a single IMU. The performances of these three algorithms are analyzed and evaluated by gait tests on the human body and comparisons with a high-precision IMU-Mocap reference device. The simulation results show that the three algorithms can effectively calibrate the IMU's position for human lower limbs. Additionally, when the degree of freedom (DOF) of a certain dimension is limited, the performances of the DWPSO and GWO may be better than GN, when the joint changes sufficiently, the performances of the three are close. The results confirm that the dynamic calibration algorithm based on joint constraints can effectively reduce the position offset errors of IMUs on upper or lower limbs in practical applications.
惯性测量单元 (IMU) 的位置校准是人体运动捕捉的重要组成部分,特别是在可穿戴系统中。在实际应用中,当 IMU 松安装在人体上时,其在运动过程中的静态校准会迅速失效。在本文中,我们提出了一种基于关节约束的腰部、大腿、小腿和脚部 IMU 的动态位置校准算法。为了解决 IMU 位置位移的问题,我们引入了基于雅可比矩阵的高斯-牛顿 (GN) 方法、动态权重粒子群优化 (DWPSO) 和灰狼优化 (GWO) 来实现 IMU 的位置校准。此外,我们建立了人体下肢的坐标系来估计每个关节角度,并使用四元数领域的融合算法来提高单个 IMU 的姿态校准性能。通过人体步态测试和与高精度 IMU-Mocap 参考设备的比较,对这三种算法的性能进行了分析和评估。仿真结果表明,这三种算法可以有效地校准人体下肢的 IMU 位置。此外,当某个维度的自由度 (DOF) 受到限制时,DWPSO 和 GWO 的性能可能优于 GN,当关节变化充分时,这三种算法的性能接近。结果证实了基于关节约束的动态校准算法可以有效地减少实际应用中上下肢 IMU 的位置偏移误差。