School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052, Australia.
Sensors (Basel). 2021 Oct 29;21(21):7218. doi: 10.3390/s21217218.
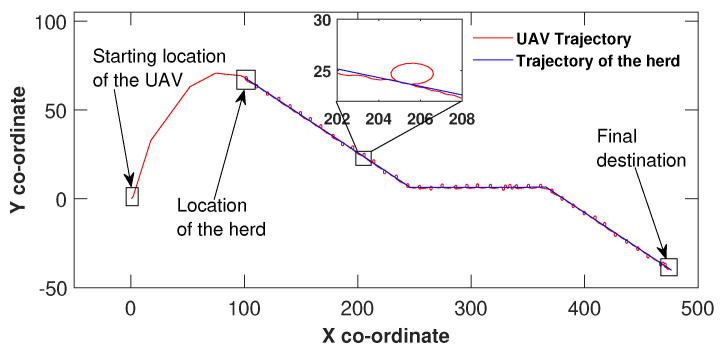
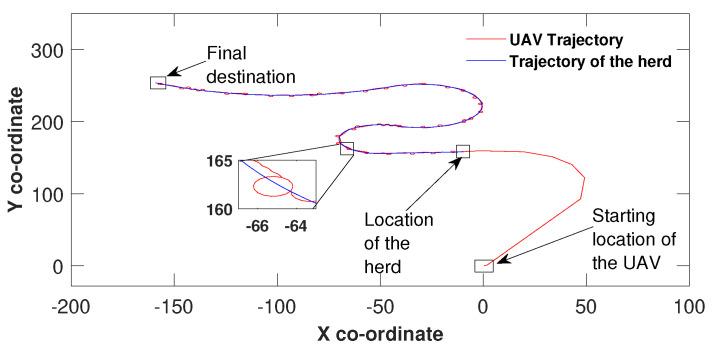
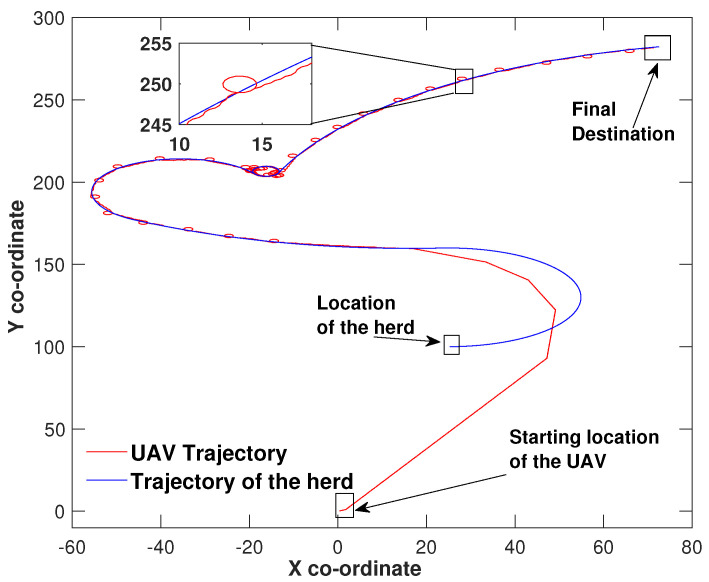
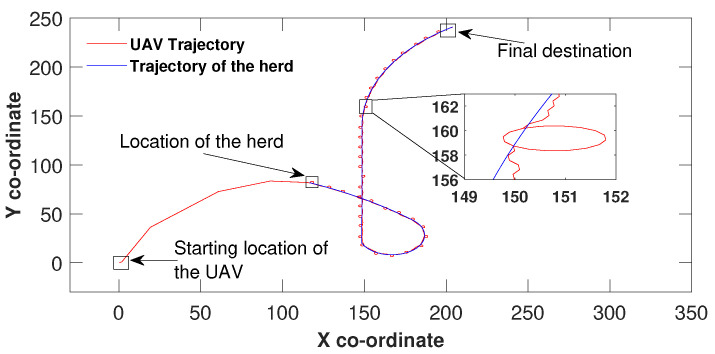
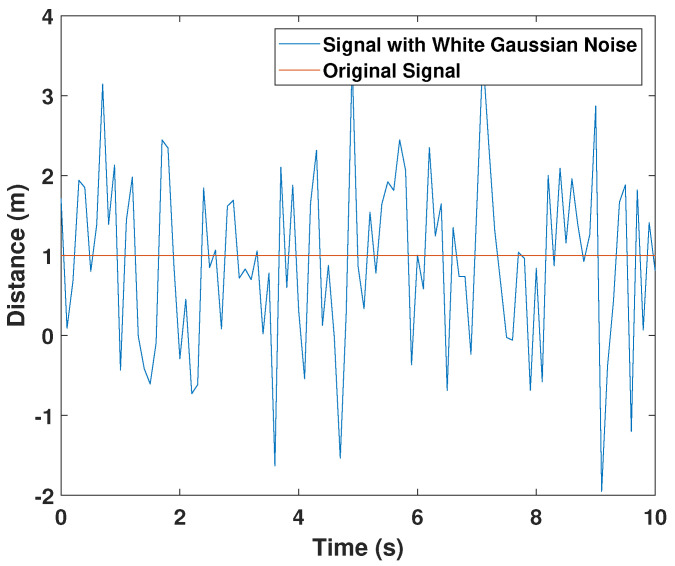
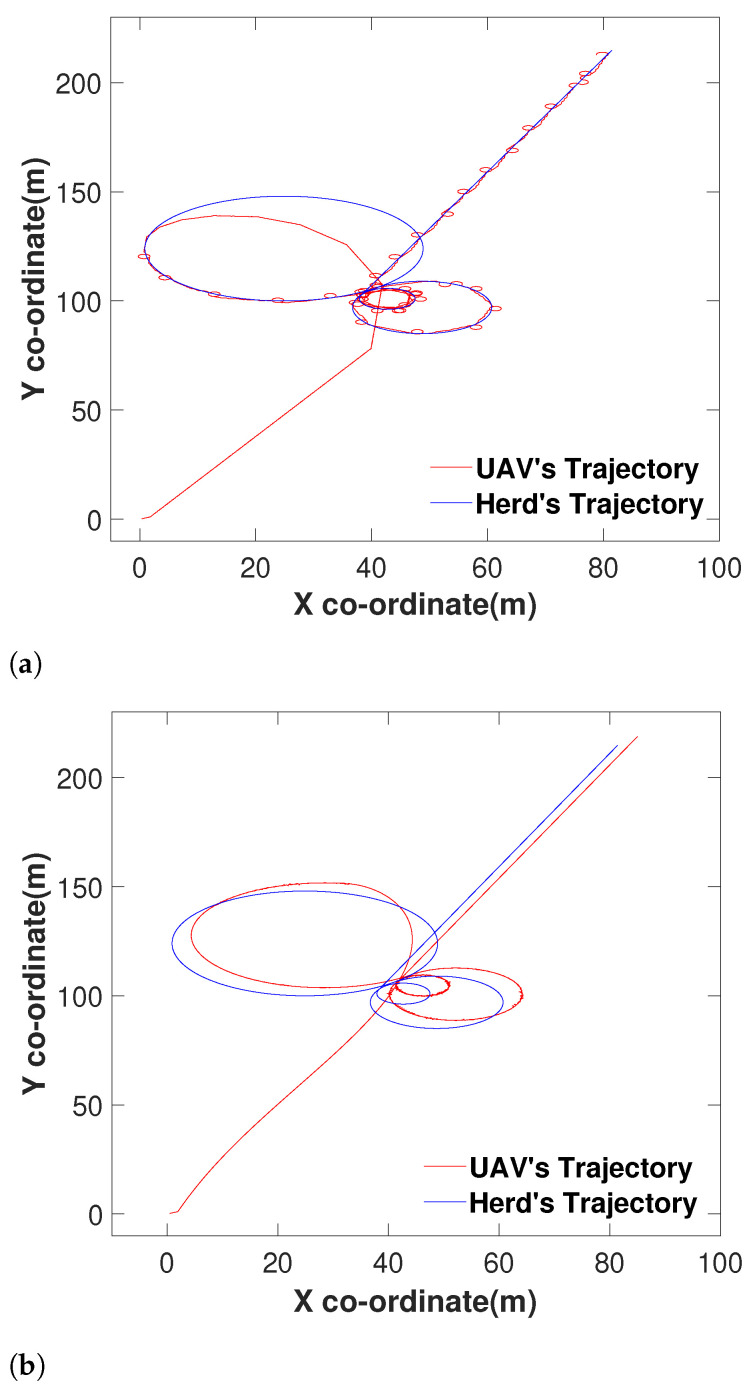
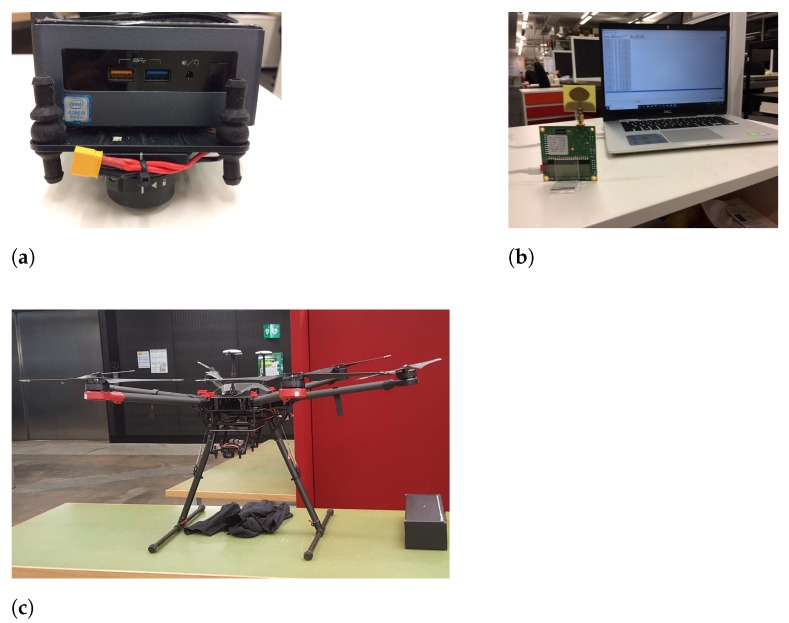
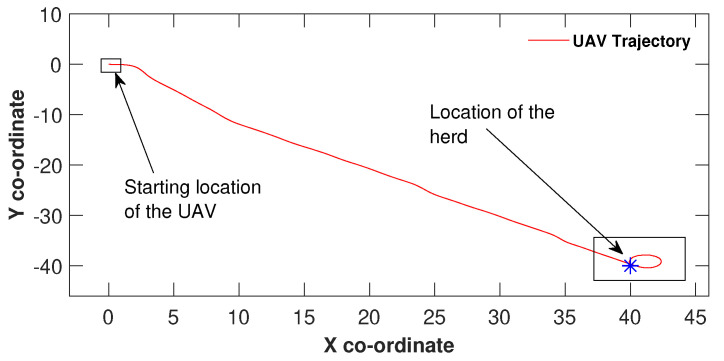
This paper proposes an algorithm that will allow an autonomous aerial drone to approach and follow a steady or moving herd of cattle using only range measurements. The algorithm is also insensitive to the complexity of the herd's movement and the measurement noise. Once arrived at the herd of cattle, the aerial drone can follow it to a desired destination. The primary motivation for the development of this algorithm is to use simple, inexpensive and robust sensing hence range sensors. The algorithm does not depend on the accuracy of the range measurements, rather the rate of change of range measurements. The proposed method is based on sliding mode control which provides robustness. A mathematical analysis, simulations and experimental results with a real aerial drone are presented to demonstrate the effectiveness of the proposed method.
本文提出了一种算法,该算法仅使用距离测量值即可使自主空中无人机接近并跟随稳定或移动的牛群。该算法也不受牛群运动的复杂性和测量噪声的影响。一旦到达牛群,空中无人机就可以跟随它到一个期望的目的地。开发此算法的主要动机是使用简单,廉价且鲁棒的传感器,即距离传感器。该算法不依赖于距离测量的准确性,而是依赖于距离测量值的变化率。所提出的方法基于滑模控制,提供了鲁棒性。通过使用真实的空中无人机进行数学分析、模拟和实验结果,验证了所提出方法的有效性。