Department of Electronic Engineering, National Yunlin University of Science and Technology, Douliu 64002, Taiwan.
Department of Computer Science and Information Engineering, National Chin-Yi University of Technology, Taichung 411030, Taiwan.
Sensors (Basel). 2021 Nov 7;21(21):7399. doi: 10.3390/s21217399.
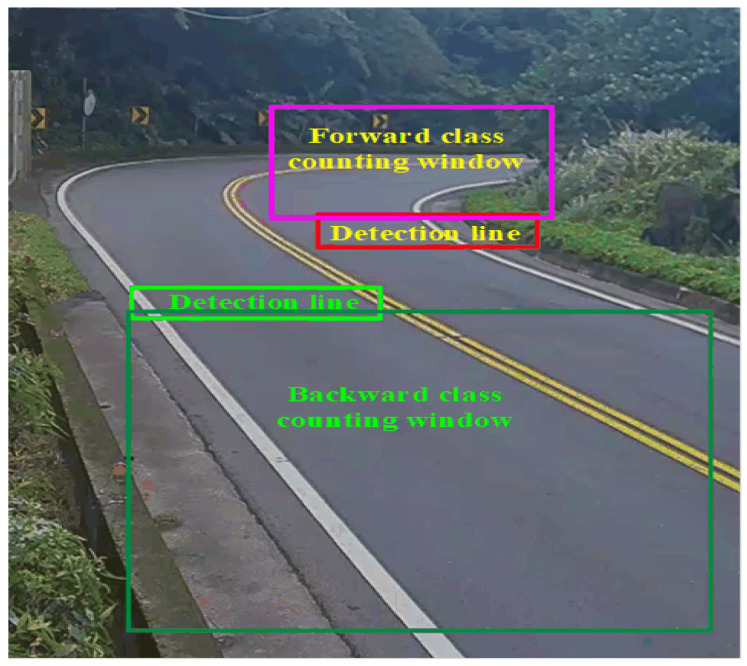
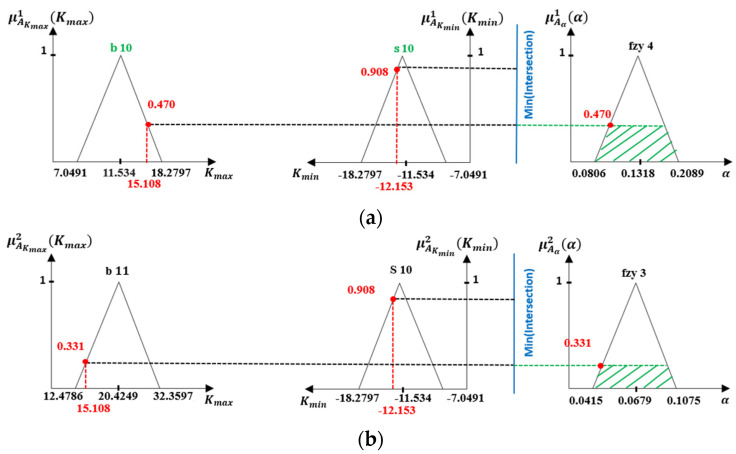
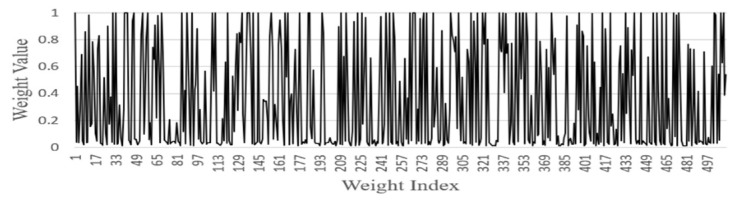
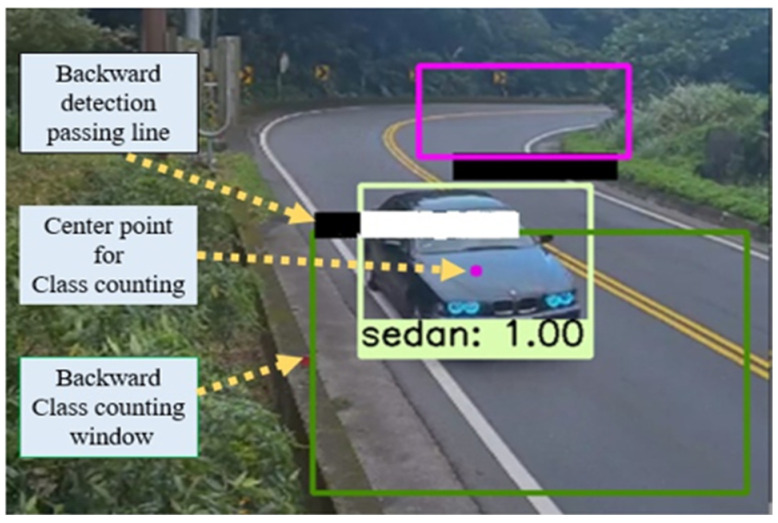
The aim of this paper is to distinguish the vehicle detection and count the class number in each classification from the inputs. We proposed the use of Fuzzy Guided Scale Choice (FGSC)-based SSD deep neural network architecture for vehicle detection and class counting with parameter optimization. The 'FGSC' blocks are integrated into the convolutional layers of the model, which emphasize essential features while ignoring less important ones that are not significant for the operation. We created the passing detection lines and class counting windows and connected them with the proposed FGSC-SSD deep neural network model. The 'FGSC' blocks in the convolution layer emphasize essential features and find out unnecessary features by using the scale choice method at the training stage and eliminate that significant speedup of the model. In addition, FGSC blocks avoided many unusable parameters in the saturation interval and improved the performance efficiency. In addition, the Fuzzy Sigmoid Function (FSF) increases the activation interval through fuzzy logic. While performing operations, the FGSC-SSD model reduces the computational complexity of convolutional layers and their parameters. As a result, the model tested Frames Per Second (FPS) on edge artificial intelligence (AI) and reached a real-time processing speed of 38.4 and an accuracy rate of more than 94%. Therefore, this work might be considered an improvement to the traffic monitoring approach by using edge AI applications.
本文旨在从输入中区分车辆检测和分类计数的类别数量。我们提出了使用基于模糊引导比例选择(FGSC)的 SSD 深度神经网络架构进行车辆检测和类别计数,并进行参数优化。“FGSC”块被集成到模型的卷积层中,在训练阶段通过比例选择方法强调重要特征,同时忽略对操作不重要的不太重要的特征,从而排除了模型的显著加速。我们创建了通过检测线和分类计数窗口,并将其与所提出的 FGSC-SSD 深度神经网络模型连接起来。卷积层中的“FGSC”块通过使用比例选择方法来强调重要特征并找出不必要的特征,从而消除了模型的显著加速。此外,FGSC 块避免了饱和区间内的许多无用参数,并提高了性能效率。此外,模糊 Sigmoid 函数(FSF)通过模糊逻辑增加激活区间。在执行操作时,FGSC-SSD 模型减少了卷积层及其参数的计算复杂度。结果,该模型在边缘人工智能(AI)上测试的每秒帧数(FPS)达到了 38.4,准确率超过 94%。因此,这项工作可以被认为是通过使用边缘 AI 应用改进交通监控方法的一种改进。