Mukherjee Moumita, Banerjee Avijit, Papadimitriou Andreas, Mansouri Sina Sharif, Nikolakopoulos George
Robotics and AI Group, Department of Computer, Electrical and Space Engineering, Luleå University of Technology, SE-97187 Luleå, Sweden.
Sensors (Basel). 2021 Dec 10;21(24):8259. doi: 10.3390/s21248259.
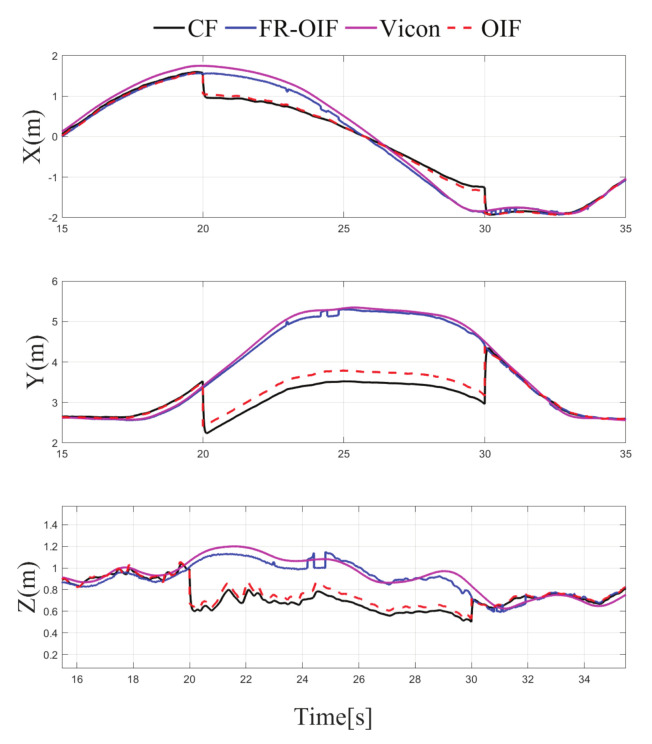
This article proposes a novel decentralized two-layered and multi-sensorial based fusion architecture for establishing a novel resilient pose estimation scheme. As it will be presented, the first layer of the fusion architecture considers a set of distributed nodes. All the possible combinations of pose information, appearing from different sensors, are integrated to acquire various possibilities of estimated pose obtained by involving multiple extended Kalman filters. Based on the estimated poses, obtained from the first layer, a Fault Resilient Optimal Information Fusion (FR-OIF) paradigm is introduced in the second layer to provide a trusted pose estimation. The second layer incorporates the output of each node (constructed in the first layer) in a weighted linear combination form, while explicitly accounting for the maximum likelihood fusion criterion. Moreover, in the case of inaccurate measurements, the proposed FR-OIF formulation enables a self resiliency by embedding a built-in fault isolation mechanism. Additionally, the FR-OIF scheme is also able to address accurate localization in the presence of sensor failures or erroneous measurements. To demonstrate the effectiveness of the proposed fusion architecture, extensive experimental studies have been conducted with a micro aerial vehicle, equipped with various onboard pose sensors, such as a 3D lidar, a real-sense camera, an ultra wide band node, and an IMU. The efficiency of the proposed novel framework is extensively evaluated through multiple experimental results, while its superiority is also demonstrated through a comparison with the classical multi-sensorial centralized fusion approach.
本文提出了一种新颖的基于分散式两层多传感器的融合架构,用于建立一种新型的弹性姿态估计方案。如下文所述,融合架构的第一层考虑一组分布式节点。整合来自不同传感器的姿态信息的所有可能组合,以获取通过多个扩展卡尔曼滤波器得到的各种估计姿态可能性。基于从第一层获得的估计姿态,在第二层引入了故障弹性最优信息融合(FR-OIF)范式,以提供可信的姿态估计。第二层以加权线性组合的形式合并每个节点(在第一层构建)的输出,同时明确考虑最大似然融合准则。此外,在测量不准确的情况下,所提出的FR-OIF公式通过嵌入内置的故障隔离机制实现自我弹性。此外,FR-OIF方案还能够在存在传感器故障或错误测量的情况下实现精确的定位。为了证明所提出的融合架构的有效性,使用配备了各种机载姿态传感器(如3D激光雷达、实感相机、超宽带节点和惯性测量单元)的微型飞行器进行了广泛的实验研究。通过多个实验结果广泛评估了所提出的新颖框架的效率,同时通过与经典的多传感器集中式融合方法进行比较也证明了其优越性。