Zahra Omar, Tolu Silvia, Zhou Peng, Duan Anqing, Navarro-Alarcon David
Department of Mechanical Engineering, The Hong Kong Polytechnic University, Kowloon, Hong Kong SAR, China.
Department of Electrical Engineering, Technical University of Denmark, Copenhagen, Denmark.
Front Neurorobot. 2022 Mar 14;16:826410. doi: 10.3389/fnbot.2022.826410. eCollection 2022.
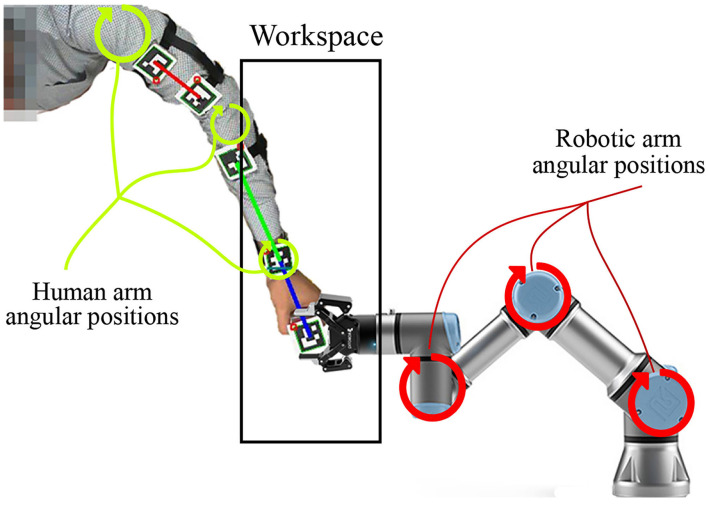
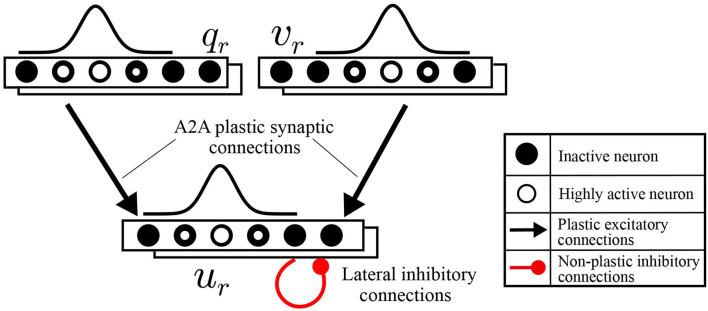
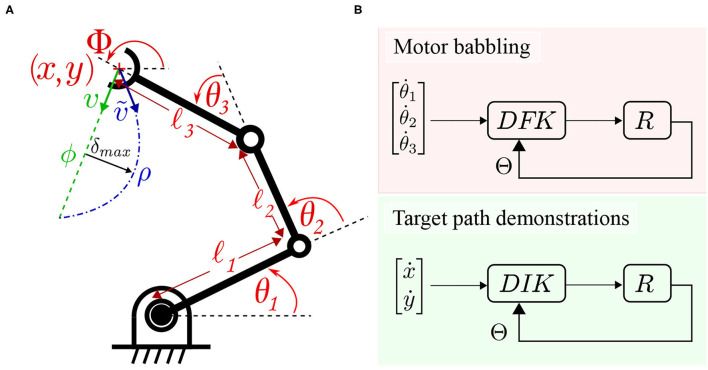
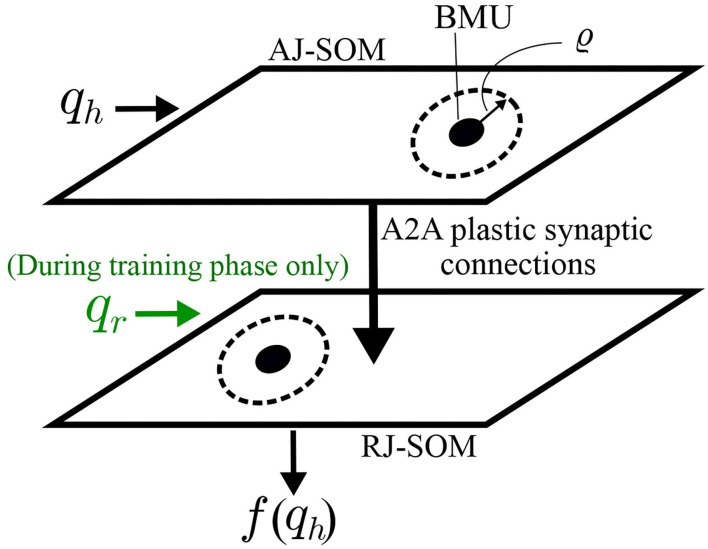
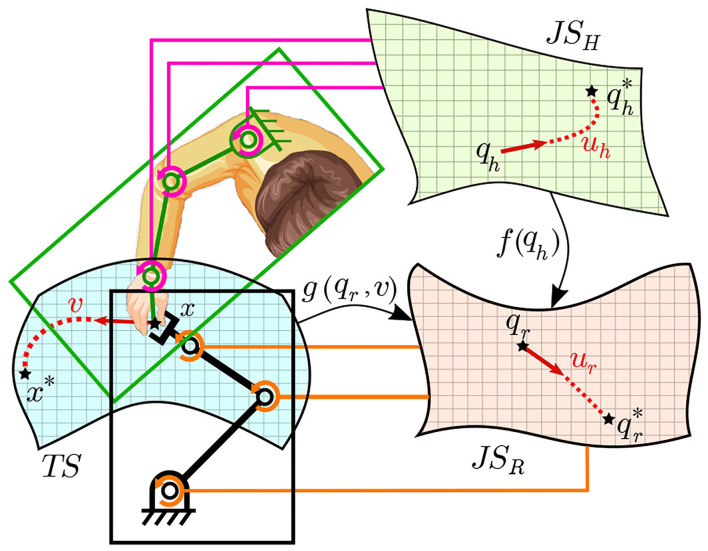
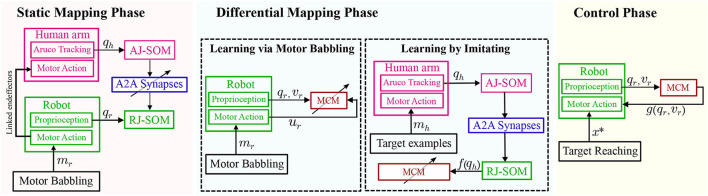
Different learning modes and mechanisms allow faster and better acquisition of skills as widely studied in humans and many animals. Specific neurons, called mirror neurons, are activated in the same way whether an action is performed or simply observed. This suggests that observing others performing movements allows to reinforce our motor abilities. This implies the presence of a biological mechanism that allows creating models of others' movements and linking them to the self-model for achieving mirroring. Inspired by such ability, we propose to build a map of movements executed by a teaching agent and mirror the agent's state to the robot's configuration space. Hence, in this study, a neural network is proposed to integrate a motor cortex-like differential map transforming motor plans from task-space to joint-space motor commands and a static map correlating joint-spaces of the robot and a teaching agent. The differential map is developed based on spiking neural networks while the static map is built as a self-organizing map. The developed neural network allows the robot to mirror the actions performed by a human teaching agent to its own joint-space and the reaching skill is refined by the complementary examples provided. Hence, experiments are conducted to quantify the improvement achieved thanks to the proposed learning approach and control scheme.
不同的学习模式和机制能使技能的获取更快、更好,这在人类和许多动物中都得到了广泛研究。特定的神经元,即镜像神经元,无论动作是被执行还是仅仅被观察,都会以相同的方式被激活。这表明观察他人执行动作有助于增强我们的运动能力。这意味着存在一种生物机制,能够创建他人动作的模型,并将其与自我模型相联系以实现镜像。受这种能力的启发,我们提议构建一个由教学代理执行的动作地图,并将代理的状态映射到机器人的配置空间。因此,在本研究中,我们提出了一种神经网络,它整合了一个类似运动皮层的差分地图,用于将运动计划从任务空间转换为关节空间的运动指令,以及一个静态地图,用于关联机器人和教学代理的关节空间。差分地图基于脉冲神经网络开发,而静态地图则构建为自组织地图。所开发的神经网络使机器人能够将人类教学代理执行的动作映射到其自身的关节空间,并通过提供的补充示例来完善伸手技能。因此,我们进行了实验,以量化由于所提出的学习方法和控制方案而实现的改进。